1) flexible free floating manipulator

弹性空间机械臂
2) space flexible manipulator
柔性空间机械臂
1.
The self-learning control of a free-floating space flexible manipulator based on fuzzy neural network is studied.
讨论了载体位置不受控、姿态受控情况下,自由漂浮柔性空间机械臂的高斯基模糊神经网络自学习控制问题。
3) flexible manipulator
弹性机械臂
1.
The effect of shear deformation and the inertia rotation on the dynamic response of flexible manipulator were analyzed.
对Timoshenko梁、Rayleigh梁和Benoulli-Euler梁动力学模型进行数值仿真和比较,分析了剪切变形和转动惯性矩对弹性机械臂动力响应的影响,得出剪切变形、转动惯性矩只对短粗梁有较大影响,对细长梁影响很小,可以忽略不计。
4) space manipulator
空间机械臂
1.
Application of VM and ADAMS in space manipulator;
虚拟机械臂和ADAMS在空间机械臂研究中的应用
2.
Attitude optimal control of the space manipulator using particle swarm optimization;
空间机械臂姿态运动规划的粒子群方法
3.
Attitude control of a space manipulator using Quasi-Newton method;
基于拟牛顿算法的空间机械臂姿态优化控制
5) space manipulators
空间机械臂
1.
Three-dimensional attitude control of a rigid spacecraft with space manipulators;
带空间机械臂的航天器三维姿态运动控制
2.
Due to total angular momentum conservation about the system centre of mass, a torque-free spacecraft system with space manipulators becomes the nonholonomic control system.
自由漂浮空间机械臂系统在无外力矩作用时,系统的动量矩守恒而成为非完整系统。
6) free-floating space rigid manipulator
漂浮基空间刚性机械臂
1.
The control problem of coordinated motion of free-floating space rigid manipulator with external disturbance is discussed.
讨论了载体位置无控、姿态受控情况下,具有外部扰动的漂浮基空间刚性机械臂,载体姿态与末端爪手协调运动的控制算法设计问题。
补充资料:机械零件:弹性环联接
弹性环联接
由两个内外锥面配合的弹性环挤紧在轴与孔之间所构成的可拆联接(见图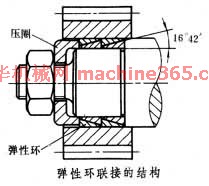 弹性环联接的结构 )。弹性环的锥角一般为12.5°~17°。拧紧螺母可使内外环互相挤紧﹐轴﹑孔与环之间產生径向压力﹐工作时靠相伴而生的摩擦力来传递扭矩和轴向力。弹性环一般用中﹑高碳钢或铬钢製成﹐要求表面精加工和配合良好。联接的定心精度要求很高时﹐宜用整环。弹性环联接承载能力高﹐没有应力集中源﹐定心性好﹐装拆方便﹐有足够的紧密性﹐过载时出现的打滑现象对联接还有保护作用。由於弹性环要佔一定的空间且需要螺纹联接以產生预紧力﹐应用有时受到构造上的限制。
弹性环联接的结构 )。弹性环的锥角一般为12.5°~17°。拧紧螺母可使内外环互相挤紧﹐轴﹑孔与环之间產生径向压力﹐工作时靠相伴而生的摩擦力来传递扭矩和轴向力。弹性环一般用中﹑高碳钢或铬钢製成﹐要求表面精加工和配合良好。联接的定心精度要求很高时﹐宜用整环。弹性环联接承载能力高﹐没有应力集中源﹐定心性好﹐装拆方便﹐有足够的紧密性﹐过载时出现的打滑现象对联接还有保护作用。由於弹性环要佔一定的空间且需要螺纹联接以產生预紧力﹐应用有时受到构造上的限制。
由两个内外锥面配合的弹性环挤紧在轴与孔之间所构成的可拆联接(见图
弹性环联接的结构 )。弹性环的锥角一般为12.5°~17°。拧紧螺母可使内外环互相挤紧﹐轴﹑孔与环之间產生径向压力﹐工作时靠相伴而生的摩擦力来传递扭矩和轴向力。弹性环一般用中﹑高碳钢或铬钢製成﹐要求表面精加工和配合良好。联接的定心精度要求很高时﹐宜用整环。弹性环联接承载能力高﹐没有应力集中源﹐定心性好﹐装拆方便﹐有足够的紧密性﹐过载时出现的打滑现象对联接还有保护作用。由於弹性环要佔一定的空间且需要螺纹联接以產生预紧力﹐应用有时受到构造上的限制。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条