1) double inverted pendulum

两级倒立摆
1.
The control problem of a double inverted pendulum on an inclined rail is studied.
对倾斜导轨上两级倒立摆的控制问题进行研究,要求设计出的控制器不仅能使摆杆在垂直方向保持稳定,而且能控制小车在导轨上的位置。
2.
Based on this method, the double inverted pendulum equilibrium control system is studied.
简要地介绍了基于观测器的鲁棒H∞状态反馈综合方法,并利用这种方法对两级倒立摆平衡控制系统进行了研究,给出了鲁棒控制器并通过仿真的手段对所得的闭环系统进行了分析。
2) single inverted pendulum
单级倒立摆
1.
A simulation analysis of two control methods for a single inverted pendulum;
单级倒立摆的两种控制方法的仿真研究
2.
Application of Fuzzy Control in Single Inverted Pendulum System;
单级倒立摆系统中模糊控制理论的应用
3.
The mathematical model of a single inverted pendulum is built by using the Newton mechanics,and the two control methods which are usually used in the inverted pendulum system,that is conventional PID, the self-training property of neural net Fuzzy control are discussed.
运用牛顿动力学方法对单级倒立摆系统进行了数学建模,并对基于经典控制理论的PID控制法、基于自适应神经网络模糊控制方法进行了仿真对比分析研究。
3) double inverted pendulum
二级倒立摆
1.
Control design of double inverted pendulum based on intrinsic characteristics of the system;
基于系统内部限制的二级倒立摆控制器
2.
The control of a double inverted pendulum by using hierarchical fuzzy neural network;
二级倒立摆的递阶模糊神经网络控制
3.
Simulation design of double inverted pendulum digital controller;
二级倒立摆数字控制器仿真设计
4) single-inverted pendulum
单级倒立摆
1.
Based on the T-S fuzzy model of the single-inverted pendulum,a design method of fuzzy controller is presented by using the concept of CDF(compensation and division for fuzzy model) and the approach of linear matrix inequality.
基于单级倒立摆这一非线性系统的T-S模糊模型,提出了一种采用模糊模型相除补偿技术和LMI技术相结合的模糊控制器设计方法,并在MATLAB/Simulink上进行了仿真试验。
2.
This paper deduces the mathematical model of a single-inverted pendulum system by Lagrange equation and designs its controller by the adaptive fuzzy method, later, combining its model and controller in Matlab simulation and operating it.
根据Lagrange方程建立了单级倒立摆系统的数学模型,利用模糊自适应控制算法设计了倒立摆系统的控制器,并在Matlab的仿真模块中将倒立摆系统的数学模型和控制器结合起来,对倒立摆控制系统进行了仿真研究。
5) the double inverted pendulum
二级倒立摆
1.
This paper propose optimized the double inverted pendulum s length of the pole.
文中对二级倒立摆装置的摆长进行了优化,该方法确定的二级倒立摆的摆长参数能提高二级倒立摆的可控性,增强系统的适应性。
2.
By the use of LQR,we get an optimal control for the double inverted pendulum system and turn it to be effective by the MATLAB-simulated experiments.
本文建立了二级倒立摆的数学模型,并推导出模型的状态空间表达式,分析了系统的稳定性,能控性和能观性,利用了线性二次型最优调节器(LQR)方法实现对二级倒立摆的最优控制,MATLAB仿真结果表明了该方法的有效性。
6) triple inverted-pendulum
三级倒立摆
1.
This paper sets up a mathematical model of triple inverted-pendulum in the first place,and linearize it at the balance point,then control rules are deduced using the quadratic optimal control theory.
本文首先建立了直线三级倒立摆的非线性数学模型,然后在平衡点处对其线性化,再利用二次型最优控制理论,导出控制规律。
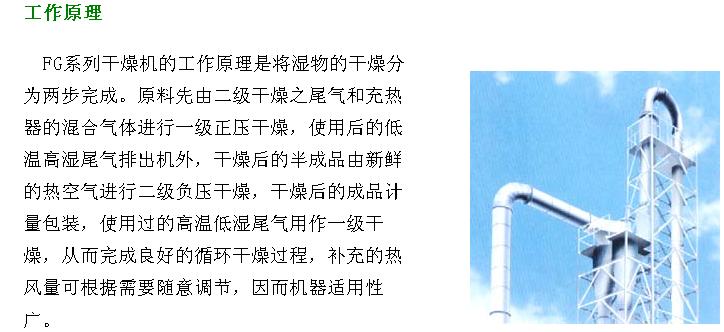
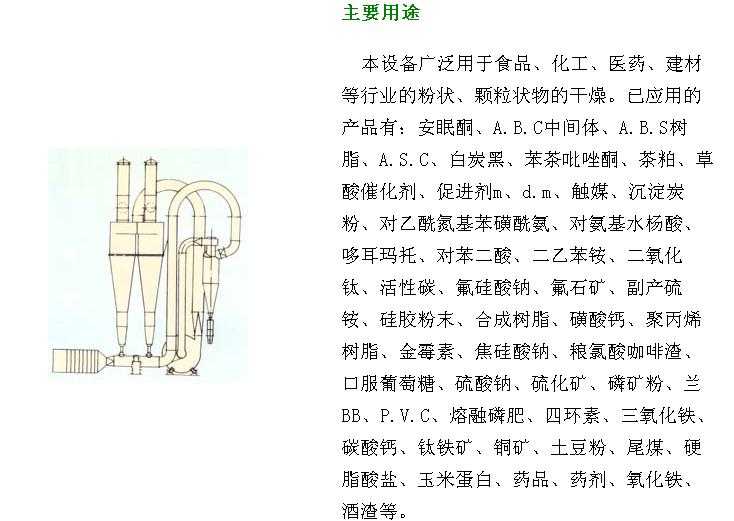
补充资料:FG正负两级气流干燥机
技术参数
型号 | FG0.25 | FG0.5 | FG0.9 | FG1.5 | FG2.0 | FG2.5 | FG3.0 | FG3.5 |
蒸发水份(kg/h) | 113 | 225 | 450 | 675 | 900 | 1125 | 1150 | 1491 |
| 功率配备(kw) | 11 | 18.5 | 30 | 50 | 75 | 90 | 110 | 110 |
| 占地面积(m2) | 3.5×2.5 | 7×5 | 7×6.5 | 8×7 | 11×7 | 12×7 | 14×10 | 14×10 |
| 热效率(%) | >80 | >80 | >80 | >80 | >80 | >80 | >80 | >80 |
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条