
由气源﹑承载平台和若干个气垫单元组成的物料搬运机械﹐简称气垫。气垫利用气垫单元托起重物并利用气垫单元与地面之间的流动空气层来降低摩擦阻力以便搬运。它主要用于短距离搬运重物(图1 气垫搬运装置搬运重物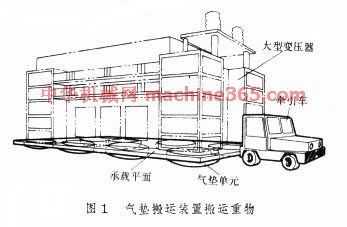 )﹐如搬运大型变压器﹑重型设备等﹐也可用于船体对接﹑飞机装配等要求定位准确的场合。还可利用气垫将固定有大型工件的移动式加工平台推至机床的加工位置﹐以提高机床的利用率。气垫还可用于大型雷达和活动舞台﹐使其运转灵活。 当重物有足够的平坦底面时可不用承载平台。气垫单元一般为一气囊﹐用加帘布的橡胶制成。充气前重物由硬质木料或硬橡胶支撑。充气后压缩空气首先进入气囊﹐经通气孔进入气室。气囊膨胀贴住地面﹐将气室围封起来﹐阻挡空气外泄。气囊和气室内的气压一般可达0.1~0.35兆帕。当产生的浮托力与重物重量相等时重物即被托起(图2 气垫单元工作过程
)﹐如搬运大型变压器﹑重型设备等﹐也可用于船体对接﹑飞机装配等要求定位准确的场合。还可利用气垫将固定有大型工件的移动式加工平台推至机床的加工位置﹐以提高机床的利用率。气垫还可用于大型雷达和活动舞台﹐使其运转灵活。 当重物有足够的平坦底面时可不用承载平台。气垫单元一般为一气囊﹐用加帘布的橡胶制成。充气前重物由硬质木料或硬橡胶支撑。充气后压缩空气首先进入气囊﹐经通气孔进入气室。气囊膨胀贴住地面﹐将气室围封起来﹐阻挡空气外泄。气囊和气室内的气压一般可达0.1~0.35兆帕。当产生的浮托力与重物重量相等时重物即被托起(图2 气垫单元工作过程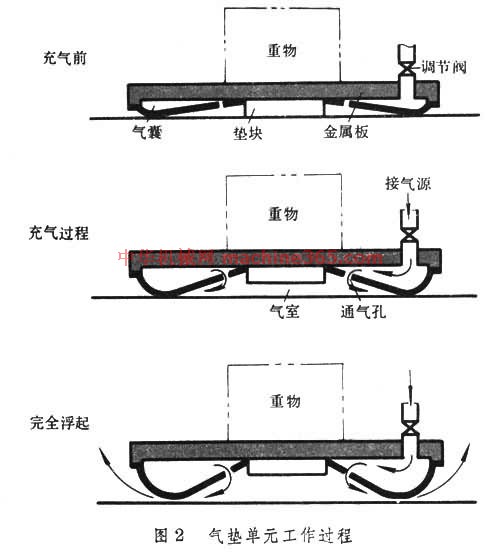 )。不断补充足够的压缩空气可使气垫单元保持 0.025~0.25毫米的离地间隙﹐空气即由间隙逸出﹐使移动阻力系数降到0.001~0.005。由调节阀调节供气量﹐可控制承载平台的托起高度。供气量过多会产生颤动﹔过少则气囊只能部分离地﹐移动阻力增大。气源可以是工厂的压缩空气系统或移动式空气压缩机组。气垫的阻力系数小﹐转向比较灵活﹐高度低﹐对地面的比压远小于轮式车辆﹐自重轻﹐构造简单﹐维修方便。例如﹐500吨的重物用气垫只需5~25千牛的力即可搬运或原地转动。为形成流动空气层托起重物所需的功率﹐每吨重物约为0.25~0.4千瓦。托起3吨重物的气垫(不包括气源)本身仅为40~50千克。但气垫因离地间隙很小﹐要求地面平整无缝﹐地面的宏观起伏和微观粗糙度都不允许超过规定值﹐否则会因漏气而导致能耗增大﹐甚至托不起重物。临时使用气垫时可在地面加铺钢板或橡胶带。气垫托起重物后地面坡度稍大即会自滑。
)。不断补充足够的压缩空气可使气垫单元保持 0.025~0.25毫米的离地间隙﹐空气即由间隙逸出﹐使移动阻力系数降到0.001~0.005。由调节阀调节供气量﹐可控制承载平台的托起高度。供气量过多会产生颤动﹔过少则气囊只能部分离地﹐移动阻力增大。气源可以是工厂的压缩空气系统或移动式空气压缩机组。气垫的阻力系数小﹐转向比较灵活﹐高度低﹐对地面的比压远小于轮式车辆﹐自重轻﹐构造简单﹐维修方便。例如﹐500吨的重物用气垫只需5~25千牛的力即可搬运或原地转动。为形成流动空气层托起重物所需的功率﹐每吨重物约为0.25~0.4千瓦。托起3吨重物的气垫(不包括气源)本身仅为40~50千克。但气垫因离地间隙很小﹐要求地面平整无缝﹐地面的宏观起伏和微观粗糙度都不允许超过规定值﹐否则会因漏气而导致能耗增大﹐甚至托不起重物。临时使用气垫时可在地面加铺钢板或橡胶带。气垫托起重物后地面坡度稍大即会自滑。
如果用水代替空气充入气垫单元﹐不需要改装即可成为水垫搬运装置﹐简称水垫。水垫搬运比气垫更为平稳﹐两者阻力系数相同﹐但水垫所需功率仅为气垫的十分之一或更低。水垫不能在会结冰的地方和不允许浸水的场合使用。浮升高度和离地间隙小的气垫﹐一般称为薄气垫。还有一种浮升高度和离地间隙大的厚气垫。它不使用气垫单元﹐而是在重物底部另装一整体的橡胶围裙形成气室﹐可通过海滩和沼泽地等高低不平的地面﹐大多用于交通运输和军事方面。使用气压仅为(0.7~3.5)×103帕﹐但耗气量很大﹐能量消耗比薄气垫大得多。