1) autonomous underwater vehicle for environmental protection

自治型水下环保机器人
2) autonomous underwater vehicle(AUV)
自治水下机器人
1.
CAN bus is applied to autonomous underwater vehicle(AUV) to construct a distributed control system with multimaster to replace the traditional centralized control structure and master-slave network structure used by AUV.
将CAN总线应用在自治水下机器人中,构成多主站的分布式控制系统,取代了以往水下机器人采用的集中式控制结构及主从式网络结构。
2.
A robust H~∞ filter is developed for the heading control system of an autonomous underwater vehicle(AUV) to estimate some state variables which are not always available and are often difficult to measure in practice,and we extend the filter s application to the AUV heading control system.
研究设计了一个鲁棒H∞滤波器来解决自治水下机器人(AUV)航向控制系统中部分难以测量状态变量的估计问题,并将其应用在AUV的航向控制系统中。
3.
This paper analyses the real undersea environment effects on Autonomous Underwater Vehicle(AUV) and presents a local planning architecture based on Fuzzy Logic(FL).
针对自治水下机器人(AUV)所处的真实海洋环境,通过分析长距离航行时AUV局部规划必须考虑的各种因素和可能产生的影响,设计一种局部规划器的结构,提出基于模糊逻辑的解决方案。
3) Autonomous Underwater Vehicle
自治水下机器人
1.
A Vertical Plane Obstacle Avoidance Planning Method for Autonomous Underwater Vehicle;
一种自治水下机器人垂直面避碰规划方法
2.
Path following control of autonomous underwater vehicle based upon fuzzy hybrid control;
基于模糊混合控制的自治水下机器人路径跟踪控制
3.
A robust path following control method based upon non-singular terminal sliding mode control is proposed for the nonlinear and underactuated autonomous underwater vehicle.
针对非线性欠驱动自治水下机器人(A u tonom ous underw ater veh icle,缩写为AUV),提出了一种基于非奇异终端滑模(N on-s ingu lar term ina l slid ing m ode,缩写为NTSM)控制的鲁棒路径跟踪控制方法。
4) AUV
自治水下机器人
1.
A Collision Avoidance Algorithm and Its Simulation for AUV;
自治水下机器人避碰算法及其仿真研究
2.
Due to the non-linear dynamics of autonomous underwater vehicles (AUVs) and large amount of uncertainties involved in model parameters (e.
由于自治水下机器人(AUV)动力学的非线性、模型参数以及海洋环境扰动的不确定性,基于常规PID控制的AUV性能通常不够理想。
3.
The design of a three-function electric manipulator to be equipped for an Autonomous Underwater Vehicle(AUV) is described at first.
简单描述了自治水下机器人搭载的三功能水下电动机械手的设计,鉴于自治水下机器人-机械手系统运动学冗余、内部可能干涉以及载体圆筒式外形等特点,将惩罚调节因子引入系统运动学伪逆矩阵,保证了关节在允许范围内运动,避免载体大幅度姿态变化及载体与机械手之间的干涉,同时采用梯度投影法优化海流作用下的系统推力。
5) autonomous underwater vehicle
自治式水下机器人
1.
When an autonomous underwater vehicle is in marine survey,in order for it to adjust to a wide variety of situations rapidly,replanning decisions must be taken to find the best scheme to finish the mission satisfactorily and ensure the vehicle s safety.
在执行海洋勘查使命过程中,当局势发生变化时,自治式水下机器人应能迅速调整以适应局势的变化,并且在需要时,它应进行重规划决策以找到最优的应对策略从而保证使命的完满完成和自身的安全。
2.
It is necessary for AUV(autonomous underwater vehicle) to have the ability of obstacles-avoidance during a long range travel in the unknown ocean environment.
自治式水下机器人(AUV)在复杂海洋环境航行时要求能够及时躲避障碍物。
6) AUV(Autonomous Underwater Vehicle)
自治式水下机器人
1.
The ability of obstacle avoidance based on forward looking sonar is a basic requirement of AUV(autonomous underwater vehicle) during a long range travel in the unknown ocean environment.
在未知海洋环境下的远程航海过程中,基于前视声纳的避障能力是AUV(自治式水下机器人)的一个基本要求。
2.
Basing on the terrain scanning mission,this paper focuses on the problem of mission and task coordination method at the planning layer of AUV(Autonomous Underwater Vehicle) control system.
以地形勘查使命为背景,对AUV(自治式水下机器人)规划层使命与任务协调方法进行了研究。
补充资料:SP-99节能型蒸汽植纤(纸浆)环保餐具生产线
 国家科技部等五部委认定 国家重点新产品 全国方便食品一次性发泡塑料包装替代办定点设备生产厂家 中国包装协会纸浆模塑分会理事单位 产品卫生国家标准GB18006.1-1999 设备荣获中国第 届专利新技术产品博览会金奖 产品卫生国家标准GB18006.1-1999 设备特点: 1、设备集机电一体化,模块组合,全自动控制,操作简单,维修方便。 2、节能专利技术,专利号:99202625.3;节能高效,不产生废气、废水、废料。 3、蒸汽节能加热,电超导加热固化定型,适应不同能源的地区投产。 4、原料来源广泛:芦苇浆、甘蔗浆、稻麦、秸杆浆,各种一年生产的植物纤维(纸浆)均可适合生产。 5、设备通用性能高,可生产不同尺寸,不用形状的各种方便面碗、快餐盒,超市净菜托盘等食品包装容器。 6、用户可根据产品特点需要选择各种机型设备。
1、装机容量:90KW 蒸汽加热,热定型机配大功率增压系统。 2、每年产快餐盒4000万只,方便面碗3500万只。 3、蒸汽加热专利技术,免费提供服务,安装调试。 4、不包括外购辅助设备(辅助设备用户自备)。 5、辅助设备(包括管道、阀门)。 加 工 工 艺 图 表  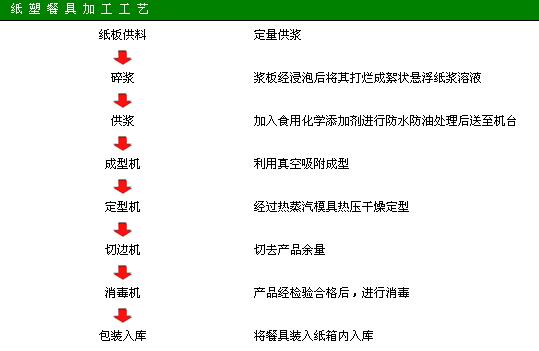 SP-99系列节能型植纤(纸浆)环保餐具成套设备产品评价 福建省泉州市远东环保设备有限公司(以下简称远东公司)是一家专业制造各种环保包装、一次性环保餐具设备的大型企业。位于泉州市展览城东侧,有宽敞的标准车间1.6万平方米,现有员工280人,其中高中级管理人员和技术人员58名,拥有最先进的电脑加工中心,结合高技术进行科学管理。 远东公司创建于1988年,目前已经形成技术开发、工艺研究、设计革新、生产制造配套一条龙。先进的电脑加工设备,科学的管理制度,严格监控,精心制造。 主要产品:植纤(纸浆)环保餐具、食品包装容器成套设备; 工业环保包装系列成套设备; 全自动抽式盒装环保面巾机; 迷尔自动环保面巾机、系列环保面巾纸、环保餐巾纸、环保卫生纸等设备。 远东公司自九二年投巨资成功开发可治理"白色污染"的植纤(纸浆)环保餐具生产流水线设备,以一年生长的植物纤维作基础原料,如:芦苇浆、甘蔗浆、棉浆,各种秸杆浆为原料,生产快餐盒、方便面碗、纸碟、纸杯、超市净菜托盘等各种环保容器。以纸代塑,消除"白色污染",净化环境。 1996年5月份,经中国铁道部治理"白色污染"专家组对植纤(纸浆)环保餐具生产线设备,及产品植纤(纸浆)环保快餐盒进行现场全面考察和产品抽验检测,根据现场实地考察和检验测试分析的结果,对该设备及产品进行全面评价如下: 1、纯天然芦苇、甘蔗,各种一年生长的植物纤维纸浆; 2、美观洁白,无毒无害,健康卫生; 3、抗100℃水,抗120℃油,无任何渗漏; 4、适合微波炉烘烤、冰箱冷冻保鲜; 5、可回收再生利用,可自然降解泥化,环保无污染。 由于现代社会的快速发展,人们生活节奏的加快,快餐食品业的迅速普及,一次性发泡塑料餐饮具用量剧增。95年统计:每年中国需要一次性发泡塑料快餐达100亿只,每年以10~15%的用量增加。废弃的发泡塑料餐具不易回收(没有回收价值),两百年不可降解,焚烧产生大量有害气体,造成严重的"白色污染",破坏生态环境。 一次性发泡塑料餐具,虽然有方便快捷的特点,但据北京消协发布2001年第1号消费警示"一过65℃发泡餐盒就有毒"。有害物质会渗入食品中对人的肝脏、肾脏、生殖系统、中枢神经系统造成损害,严重破坏身体健康。 由于发泡塑料餐具有严重污染环境,对人体的危害性,世界各国政府都注重环境的保护,治理污染、创造洁净的生活空间。 中国国家环保局、国家经贸委、铁道部等部委规定限制,禁止生产、使用一次性发泡塑料餐具,同时采取相应措施扶植(纸浆)可降解环保餐具技术的开发研究,立法推广使用可降解(纸浆)环保餐具及食品包装容器。 全国几十家科研所及环保企业根据政府的政策,投入大量资金,努力开发研究一次性可降解餐具。经五年的努力,开发了多种可降解的环保餐具。 但经专家对比认证如下: 1、塑料可降解餐具: 只能消除视觉污染,降解后对土地污染更加严重,能使土地减少微生物的生长,土壤板结;农作物大量减产。在日本已不再推广降解塑料产品。 2、粮食淀粉餐具: 成本过高,物理性能差,浪费粮食,不耐热烘烤,不受保鲜冷冻,没韧性,易碎,没有使用价值,不值得推广。 3、纸板塑料涂膜餐具: 目前国内外所生产的纸板都采用木浆生产铜板纸板,再涂上塑料薄膜作为抗水、抗油层,从外表象似可降解餐具,实质木浆材料来自木材破坏生态平衡,表面塑料膜涂层,又是不可降解材料,还有污染环境因素,只作"治白"暂时过渡产品,不值得推广。 4、植纤(纸浆)环保餐具: 植纤(纸浆)环保餐具采用一年生长的植物纤维作原料,如:甘蔗、芦苇、稻麦草、秸杆。原料资源可一年再生,是属废物利用。 产品各项物理、卫生指标都达到国家GB18006.1-1999标准。 植纤(纸浆)环保餐具可抗100℃水,抗120℃油,适合微波炉烘烤、冰箱冷冻保鲜,无毒无害,可回收利用造纸,可降解泥化成二氧化碳和水,还原于自然。 泉州市远东环保设备有限公司一向走产、学、研的科学创新道路,致力研究开发植纤(纸浆)环保餐具,推动了一次性可降解餐具行业的发展,技术一直保持在国内外同行的先进地位。 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条