1) inverse dynamics of flexible manipulator

柔性机械臂逆动力学
2) flexible manipulator
柔性机械臂
1.
T-S fuzzy modeling and control of softy cavity flexible manipulator;
软腔体柔性机械臂的T-S模糊建模与控制
2.
Identification and analysis of flexible manipulator s T-S model;
柔性机械臂T-S模糊模型的辨识及其分析
3.
Combination control of flexible manipulator;
柔性机械臂的一种组合控制
3) flexible manipulators
柔性机械臂
1.
Research in parallel computations for the forward dynamics of flexible manipulators;
柔性机械臂正动力学并行计算研究
2.
A frequency approach to regularized inverse dynamics of flexible manipulators;
柔性机械臂正则化逆动力学的频域方法
3.
To consider the effects of the dynamics of flexible manipulators and control strategy synthetically and improve the system integral performance further, the integrated system optimization mathematical model is established which includes construction parameters, sensor parameters, controller parameters and driver parameters based on the concurrent design.
为了进一步提高系统的整体性能,综合考虑柔性机械臂动力学特性与控制策略的作用,基于同时设计思想,建立了系统整体优化数学模型(包括机械臂结构、传感器、控制器和驱动器等参数)。
4) flexible robot arm
柔性机械臂
1.
Control Strategy Study of Flexible Robot Arm;
柔性机械臂控制策略探讨
2.
A flexible robot arm simulation system is built under the PID control in this paper as an example.
并通过实例,实现了柔性机械臂系统的滑动关节在PID控制下的启停仿真。
3.
A dynamic model of a flexible robot arm with a rigid body at its tip is explored.
探讨了梢端带刚体的柔性机械臂系统的动力学模型,对它存在的解耦的弯曲振动和扭转振动设计了一种形式简单的反馈控制律,用两个控制电机实现抑振和目标定位。
5) flexible mechanical arm
柔性机械臂
1.
Because the flexible mechanical arm has the characteristic of light quality, reaching the space broadly, operatein.
由于柔性机械臂具有质量轻、可达空间广、操作灵活、驱动功率小的特点,本文制球加工中心中的运送装置采用双连杆柔性机械臂。
6) hydraulic flexible manipulator
液压柔性机械臂
1.
For the purpose of the equivalent dynamics model of a hydraulic flexible manipulator,namely an electro-hydraulic position servo system with flexible load,the paper proposed a robust controller design method that combines sliding mode control and adaptive backstepping control.
针对液压柔性机械臂的等效动力学模型——柔性负载电液位置伺服系统,提出了滑模控制和自适应反演控制相结合的鲁棒控制器设计方法。
补充资料:动力机械:内燃机动力学
研究内燃机运转中的力学现象的科学。其主要任务是研究分析内燃机运转时各主要零件的运动规律及其受力情况﹐用以作为内燃机零件设计﹑计算的依据。它还研究这些力对内燃机动力装置的影响及其消减方法。内燃机动力学的主要内容为曲柄连杆机构运动学﹑曲柄连杆机构动力学和内燃机平衡分析等。
曲柄连杆机构运动学 研究曲柄﹑连杆﹐尤其是活塞的运动规律。活塞作周期性往复运动时的位移 、速度
、速度 和加速度
和加速度 可用下述各式近似求算
可用下述各式近似求算
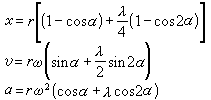
式中为曲轴转角﹔  为曲轴旋转角速度﹔
为曲轴旋转角速度﹔ 为曲柄半径﹔
为曲柄半径﹔ 为曲柄半径 与连杆长度
为曲柄半径 与连杆长度 之比﹐即 = /
之比﹐即 = /
曲柄作回转运动﹐连杆作复杂的平面运动。连杆的运动往往被简化分解为随活塞组的往复运动和随同曲柄的旋转运动。
曲柄连杆机构动力学 研究分析曲柄连杆机构(见曲柄滑块机构)在运动中力的生成﹑传递和输出。作用在曲柄连杆机构上的力有曲柄连杆机构运动时产生的往复惯性力和离心惯性力﹐以及内燃机气缸内的气体压力。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条