1) course-changing for ships

船舶转向
1.
Robust control of course-changing for ships and its optimizing design;
船舶转向的鲁棒控制及其优化设计
2) turning angle of vessel
船舶转向角
3) ship course-changing control
船舶转向控制
1.
The ship course-changing controller was designed firstly by the linear differential inclusion, which not only was easy to implement in engineering, but also, as demonstrated by the ship course-changing simulation results, achieved fast steady course-changing maneuvers without overshoot, fit steering and the strong robustness with respect to the uncertain nonlinear water dynamics term.
首次采用线性微分包含方法进行船舶转向控制器设计,其控制规律不仅易于工程实现,且应用于船舶转向控制的仿真结果表明,转向快速平稳、无超调,施舵合理,对不确定的水动力非线性项具有鲁棒性。
4) ship steering
船舶航向
1.
The LPV models of ship steering and main engine speed were established depending on ship speed etc as the scheduling parameters.
船舶航向与柴油机推进装置是紧密耦合的,但长期以来对它们的控制是完全独立的。
2.
For Norrbin ship mathematical model with nonlinear and uncertain characteristics,the ship steering robust controller was designed successfully based on backstepping algorithm and nonlinear damping algorithm.
针对带有不确定项的Norrbin非线性船舶模型,将逆推算法和非线性阻尼算法相结合,设计非线性船舶航向鲁棒控制器。
3.
A new approach to design a systematic switching linear parameter-varying controller to determine if it is practical to use for ship steering was presented,which aimed at nonlinear of ship steering.
针对船舶运动的时变非线性特性,提出了基于切换线性变参数(LPV)航向控制算法,实现船舶航向的全局控制。
5) ship course
船舶航向
1.
Design of an intelligent self-adaptive control system for ship course based on IGA-BP algorithms;
基于IGA-BP算法的船舶航向智能自适应控制系统设计
2.
H~∞ robust control for ship course
船舶航向H~∞鲁棒控制
3.
Based on the dynamic surface control method,a design scheme is proposed for ship course control system with parametric uncertainties and modeling uncertainties, as well as unknown bounded exogenous disturbances.
针对船舶航向控制非线性系统模型中存在的不确定性和外界干扰的影响,采用动态面控制算法设计了一种航向控制器。
6) ship orientation
船舶定向
1.
Realization of ship orientation system base on double GPS receivers
基于双GPS接收机的船舶定向系统实现
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
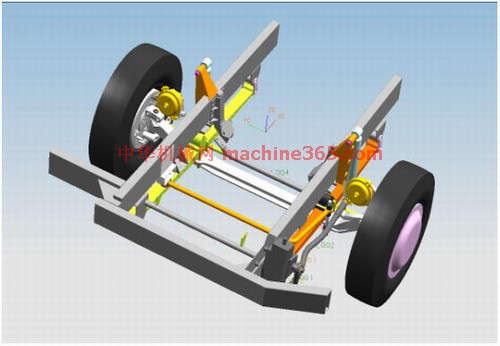
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
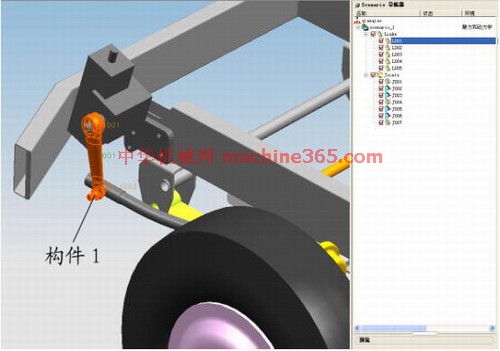
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条