2) manipulator/vehicle system

机械手/车辆系统
1.
This paper proposes a control scheme method about manipulator/vehicle system of installing manipulator on mobile mechanism by using the method of resolve motion.
就移动机构上安装机械手的机械手/车辆系统提出了一种用分解运动的方法,通过控制系统的重心,防止机械手/车辆系统倾倒的控制方案。
3) multi-manipulator system
多机械手系统
4) manipulator servo systems
机械手伺服系统
1.
Hierarchical intelligent fuzzy control for manipulator servo systems;
机械手伺服系统的两级智能模糊控制
5) machine hand system
机械手控制系统
1.
This paper introduces a kind of learning method and application study about IST instruction ,designs machine hand system controlled by PLC, fully discusses the wiring of hardware, software flow and design of source program, also discusses operation principle of this system in detai
介绍了IST指令的学习方法以及应用研究,设计了IST指令编程的PLC控制的机械手控制系统,详细地阐述了系统硬件接线和软件流程及源程序设计以及系统工作原理。
6) underwater vehicle-manipulator system
水下机器人-机械手系统
1.
Research on coordinated motion of an autonomous underwater vehicle-manipulator system;
简单描述了自治水下机器人搭载的三功能水下电动机械手的设计,鉴于自治水下机器人-机械手系统运动学冗余、内部可能干涉以及载体圆筒式外形等特点,将惩罚调节因子引入系统运动学伪逆矩阵,保证了关节在允许范围内运动,避免载体大幅度姿态变化及载体与机械手之间的干涉,同时采用梯度投影法优化海流作用下的系统推力。
补充资料:交通运轮机械:车辆转向机构
用以控制各类轮式或履带式车辆的行驶方向的机构。轮式车辆的转向机构一般由转向机和转向杆系组成。采用动力转向时﹐还需要装备液压泵﹑操纵阀﹑作用缸和贮油罐﹐合称液压助力机构。
转向方式 轮式车辆的转向机构有轴转向﹑轮转向和铰接式转向 3类。早期的汽车和现代某些全挂车上采用轴转向。这种转向方式虽然几个车轮轴线在转向时交于一点﹐但转向时车轮前后位移过大﹐转向阻力大﹐轮胎磨耗大﹐所以不适用于高速行驶的车辆。在艾克曼于19世纪末发明梯形连杆转向机构后﹐汽车已普遍采用轮转向。为使结构简单﹐大多数车辆用前轮转向。转向时尽量使全部车轮绕同一个瞬时转向中心作圆周运动
(见图 轮转向运动图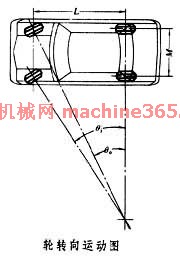 )﹐以保证转向轮不发生滑移。由于各转向轮的转弯半径不同﹐其转角也不相同﹐内外转向轮的转角之间应保持下列关系
)﹐以保证转向轮不发生滑移。由于各转向轮的转弯半径不同﹐其转角也不相同﹐内外转向轮的转角之间应保持下列关系

式中为外转向角﹐ i为内转向角﹐L 为轴距﹐
i为内转向角﹐L 为轴距﹐ 为轮距。梯形连杆机构能近似地满足这一关系。与车辆悬架配合﹐连接车轮和转向机的转向杆系有整体式和各种分段式。杆系一般布置在前轴之后﹐有时也布置在前轴之前。有的车辆因前轴为驱动轴或载荷较重或对机动性有特殊要求而用后轮转向。等轴距3轴﹑4轴或多轴车辆也有用前﹑后轮同时转向的(有的4轮驱动拖拉机采用全轮转向﹐可根据情况随时以前轮﹑后轮转向或4轮同时转向﹐甚至可以蟹行)。
为轮距。梯形连杆机构能近似地满足这一关系。与车辆悬架配合﹐连接车轮和转向机的转向杆系有整体式和各种分段式。杆系一般布置在前轴之后﹐有时也布置在前轴之前。有的车辆因前轴为驱动轴或载荷较重或对机动性有特殊要求而用后轮转向。等轴距3轴﹑4轴或多轴车辆也有用前﹑后轮同时转向的(有的4轮驱动拖拉机采用全轮转向﹐可根据情况随时以前轮﹑后轮转向或4轮同时转向﹐甚至可以蟹行)。
铰接式车辆的转向动作类似于轴转向﹐即车轮无转向动作而用液压或气压机构推动车辆的铰接部分使车辆转向。铰接式车辆大都是行驶于松软地面的越野车辆或工程机械﹐车速也较低﹐可以用这种转向方式。
履带式车辆只要使左右侧履带的速度不同即可转向﹐因此﹐一侧制动就可以在原地转向。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条