|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
1) centerline skeg

中线面尾鳍
2) leptocercal(fin)
线尾鳍
3) stern fin area
尾稳定鳍面积
4) tail fin
尾鳍
1.
Experimental device on tail fin of three degree of freedom bio-robotic fish;
3自由度仿生机器鱼尾鳍试验装置
2.
Control of tail fin flaping of robofish;
仿生机器鱼尾鳍拍动的控制算法
3.
Experimental study on hydrodynamic performance of a bio- tail fin propulsive system
仿鱼尾鳍推进系统的水动力性能试验
5) tail-fin
尾鳍
1.
On the basis of the experimental model of catamaran with robotic fish propulsor,numerical model for the tail-fin locomotion in a robotic fish propulsor was established after the forebody swing of single body and single tail robotic fish solved.
结合仿鱼推进双体船的实验模型,在解决了单体单尾机器鱼运动时摇艏问题的基础上,建立仿鱼推进器尾鳍运动的数值计算模型,用面元法计算尾柄与尾鳍以不同相位角摆动时尾鳍的平均推力性能和平均推进效率曲线,计算尾柄与尾鳍同相位摆动时尾鳍摆动频率与摆动过程中最大推力的关系曲线,从计算结果可以看出,对于双体双尾仿鱼推进器在设计中尾柄和尾鳍可以刚性联接,并适当增加尾鳍的摆动频率可以极大地提高尾鳍摆动过程中产生的最大推力,提高仿鱼推进器的推进功率。
2.
Experimental research on a bionic propulsor with double tail-fins;
针对单尾鳍摆动推进存在的机器鱼摇艏问题,理论分析了仿鱼尾鳍摆动过程中推力系数和侧向力系数的脉动情况,设计出仿生双尾推进器,并将其应用于小水线面双体船,开发出新型仿生双尾推进水上试验平台,同时,根据鱼类高效推进的机理,分析了仿生双尾推进器尾涡的相互影响。
6) caudal fin
尾鳍
1.
Based on motion similarity of microrobot drive fin and fish caudal fin, the authors discuss fish (muscle) hydrodynamics, and analyze propulsion force produced by biomimetic fish-like drive fin.
基于鱼类肌肉水动力学的研究,利用鱼类尾鳍与微机器人摆翼运动相似性,对仿生鱼型微机器人摆翼所产生的推进力进行了分析。
2.
Based on motion similarity of microrobot drive fin and fish caudal fin, this paper discusses fish muscle hydrodynamics, and analyzes propulsion force produced by biomimetic fish-like drive fin.
基于鱼类肌肉水动力学的研究,利用鱼类尾鳍与微机器人摆翼运动相似性,对仿生鱼形微机器人摆翼所产生的推进力进行了分析。
3.
This paper presents an overview of the swimming mechanisms and the caudal fin locomotion employed by fish.
本文对鱼类的游动机理和尾鳍运动学原理进行分析,提出利用尾鳍摆动轨迹研究机器鱼的运动学原理方法,设计并实现了一种三关节仿BCF(Body and/or Caudal Fin身体加尾鳍)高效推进方式机器鱼模型(OuceFish-Ⅰ),通过对机器鱼的姿态、运行轨迹进行控制和分析,并对机器鱼的实验结果做了分析,达到研究分析机器鱼的运动学原理的目的。
补充资料:CAXA-V2线切割软件在DK7725e线切割机床上的应用
目前我国有大量的装有早期操作系统的数控设备,如何对其进行升级使这些设备重新焕发青春是摆在大家面前的一个很重要的问题。本文所介绍的正是这样的一个实例,文中所叙述的内容不仅对同类设备的改造具有现实意义,而且对其他类似设备的升级也有一定的借鉴作用。 苏州三光的DK7725e线切割机床的操作系统是基于DOS平台上的,而CAXA-V2线切割软件是在Windows 98平台上开发的应用软件。显然,我们无法直接将CAXA-V2线切割软件安装到DK7725e线切割机床的操作系统中。解决这一问题的关键是寻找二者的共同之处,那就是机床的后置处理和传输功能单元,即G代码程序。 一、CAXA-V2线切割软件方面的操作 1.进入绘图界面 在装有CAXA-V2线切割软件的计算机桌面上点击图标,进入该软件的绘图界面。 2.绘制零件图
在软件的绘图区域中绘制线切割加工零件图,如图1所示。
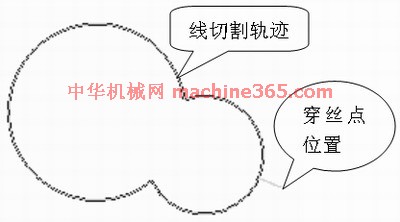
图1 线切割加工零件 3.生成加工轨迹 利用“轨迹生成”指令,生成线切割加工零件的加工轨迹,同时确定穿丝点位置和补偿量。 4.添加后置处理 由于CAXA-V2线切割软件并未提供DK7725e线切割机床的“后置处理和传输”,需要手工添加,具体操作过程如下: (1)点击CAXA-V2线切割软件的“后置处理和传输”图标,绘图区会弹出一个对话框。
(2)选中“增加机床”图标,在弹出的对话框中用键盘输入“BKDC”后,按确定键返回,如图2所示。
(3)在“后置处理和传输”的对话框中,按苏州三光的DK7725e线切割机床的“后置处理和传输”参数,手工输入相应的参数和指令,如图3所示。


图3 机床类型设置
(4)在“后置处理和传输”的对话框中点击“后置处理设置”后,相应地也会弹出一个对话框。该对话框中的参数要求也按苏州三光的DK7725e线切割机床的“后置处理设置”参数来设置,如图4所示。
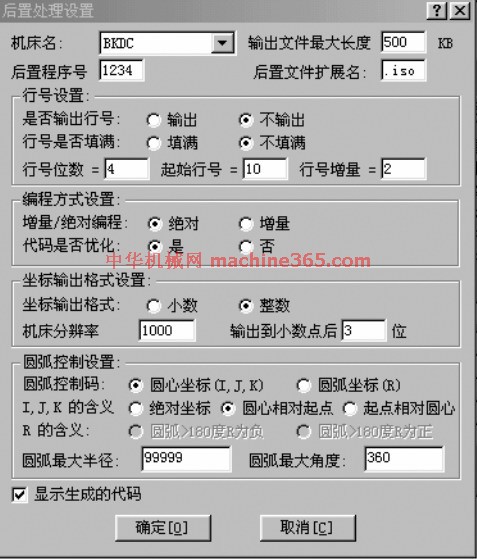
图4 后置处理设置 5.生成G代码 完成上述设置后,点击“代码生成”指令,选择“G代码生成”后,再选中线切割加工零件的加工轨迹,该轨迹图线将由绿色变为红色,最后点击鼠标右键,弹出记事本对话框显示相应的G代码加工程序,如图5所示。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|