1) 3-3R spherical type parallel mechanism

3-3R球面并联机构
2) 3-RRR spherical parallel manipulator
3-RRR球面并联机构
3) spherical 3-DOF parallel manipulator
球面3-DOF并联机构
4) Spherical parallel mechanism
球面并联机构
1.
The 3-RRS mechanism is one of the latest architectures of the spherical parallel mechanism 3-RRR families with 3 DOF and it will be used as a prototype mechanism of bionic shoulder joints of humanoid robot.
3-RRS机构是三自由度球面并联机构3-RRR的新构型之一,可作为人形机器人仿生肩关节的原型机构,因各支链的构件为球面上的曲杆,其刚度计算十分复杂。
2.
Decoupled spherical parallel mechanisms are a type of useful and applicable parallel mechanisms in engineering.
解耦球面并联机构是一类具有工程实际应用价值的并联机构,研究和开发该类机构,并对其性能进行全面的分析是机械系统创新及应用的基础性和关键性工作之一。
3.
The analytical formulations of the velocity and the acceleration of a 2-DOF spherical parallel mechanism are derived by the screw theory.
运用旋量理论的方法推导出两自由度球面并联机构的速度、加速度解析表达式,在此基础上依据虚功原理和旋量的互易积形式建立了该机构的动力学模型,得到了两驱动电机的驱动转矩方程。
5) Spherical parallel mechanisms
球面并联机构
1.
Based on the Single Opened Chain(SOC) theory,a systematic and effective method to synthesis of 3-dof spherical parallel mechanisms is proposed.
以单开链支路为单元,提出了三自由度球面并联机构型综合的一种系统、有效的方法。
6) 3-RPR planar parallel mechanism
3-RPR平面并联机构
1.
In accordance with the constraint conditions of rod lengths,the optimization model without constraints for solving the positional forward solution of 3-RPR planar parallel mechanism was presented.
根据杆长约束条件,给出了求解3-RPR平面并联机构位置正解的无约束优化模型。
补充资料:球面
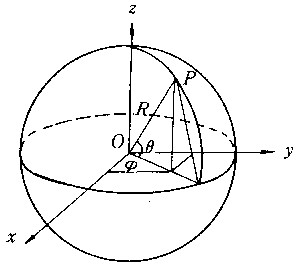
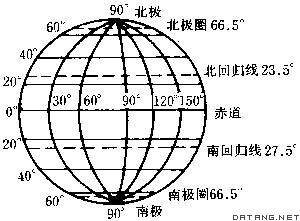
| 球面 sphere 空间中与一定点的距离为定值的动点的轨迹。定点称为球心,定距离称为半径。球面也可以看成是由半圆绕着它的直径旋转一周所形成的曲面。球面所包围的立体称为球体,简称球。在空间直角坐标系中,以坐标原点为球心,半径为R的球面的方程为x2+y2+z2=R2,它的参数方程为 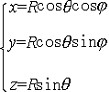  (图1)。如果把球面看成地球时,参数θ就是地球上的纬度,j就是经度。经度和纬度也叫做地球上一点的地理坐标。用平面去截球面,所得交线是圆。当平面通过球心时,在球面上截得的圆最大,称为球面上的大圆,不过球心时截得的圆称为小圆。小于半圆的弧称为劣弧。把地球表面近似地看成一个球面时,经线就是从北极到南极的半个大圆,赤道是一个大圆 ,其他纬线都是小圆(图2)。连接球面上两点的所有曲线段之中以连接这两点的大圆的劣弧为最短,称为球面上两点间的距离。因此在天空中的飞机和在大洋中的轮船,都尽可能沿大圆弧航行。球面半径为R时,球面面积为4πR2,球的体积为 (图1)。如果把球面看成地球时,参数θ就是地球上的纬度,j就是经度。经度和纬度也叫做地球上一点的地理坐标。用平面去截球面,所得交线是圆。当平面通过球心时,在球面上截得的圆最大,称为球面上的大圆,不过球心时截得的圆称为小圆。小于半圆的弧称为劣弧。把地球表面近似地看成一个球面时,经线就是从北极到南极的半个大圆,赤道是一个大圆 ,其他纬线都是小圆(图2)。连接球面上两点的所有曲线段之中以连接这两点的大圆的劣弧为最短,称为球面上两点间的距离。因此在天空中的飞机和在大洋中的轮船,都尽可能沿大圆弧航行。球面半径为R时,球面面积为4πR2,球的体积为 。 。
|
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条