1) Euler attitude angle

欧拉姿态角
2) attitude angle
姿态角
1.
Error analysis of pico-satellite attitude angle measurement based on sun vector;
基于太阳矢量的皮卫星姿态角测量误差分析
2.
Vision-based estimation of attitude angles of unmanned air vehicles;
基于视觉的无人机姿态角估计
3.
Calculation of attitude angle in dynamic radar target simulation;
动态雷达目标仿真中目标姿态角的计算
3) attitude angles
姿态角
1.
Error analysis of vehicle attitude angles in autonomous land vehicle;
陆地自主车姿态角误差分析
2.
Based on this algorithm, the relationship between north finding angle and the attitude angles was analyzed.
考虑到采用数据拟合的方法处理动态测试数据去噪效果不强,而相关滤波算法作为一种专门在动态测试中应用的相位检测算法,对随机噪声和谐波噪声都有很强的抑制作用,提出了利用相关滤波算法进行信号去噪并提取北向角信息的思想;在此基础上,通过分析平台姿态角与寻北角之间的解析关系,推导了可以消除姿态影响的姿态补偿算法,该算法需要再增加两个加速度计敏感姿态角。
3.
On the foundation of concise introduction for attitude angles and the earth s magnetic field,electronic compass principle was analyzed,and based on the magnetoresistive sensors,the MEMS accelerometer and SoC(System on Chip) MCU,the electronic compass was designed and implemented.
在简单介绍了姿态角和地磁场的基础上,分析了电子罗盘工作原理,设计了基于磁阻传感器、MEMS加速度传感器及SoC(System on Chip)MCU的电子罗盘。
4) all-attitude angle
全姿态角
1.
A new method of combined quaternion and Euler angle was proposed to solve the singularity problem of Euler angle velocity equation at large extent attitude movement and all-attitude angles and jumping problems for the limitary of attitude angle using quaternion method in ejection seat performance simulation.
针对弹射座椅性能仿真中欧拉角速率方程在大幅度姿态运动时存在奇异性,以及四元数法由于姿态角的有界性而出现跳跃、难以实现全姿态角的问题,提出了四元数与欧拉角相结合的方法。
6) attitude
[英]['ætɪtju:d] [美]['ætə'tud]
姿态角
1.
To improve the precision of attitude measurement of the space-stable inertial navigation system,an angle error model of gyro case rotation axis in gyro coordination is built,and with consideration of effect of magnitude and initial phase of the angle error,attitude matrix in NED coordination is derived.
为了提高空间稳定惯性导航系统的姿态角测量精度,建立了壳体翻滚失准角模型,给出了从壳体翻滚失准角幅值和初始相位到当地水平坐标系下的姿态转换矩阵的传递规律。
2.
Estimation method of relative position and attitudein spacecraft rendezvous and docking;
数字仿真结果表明,由于算法直接利用特征光点的几何配置条件,避免了传统算法在计算过程中出现畸变的问题,提高了姿态角估值的精度。
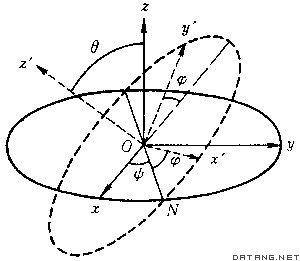
补充资料:欧拉角
| 欧拉角 Eulerian angles 用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角j组成。为欧拉首先提出而得名。它们有多种取法,下面是常见的一种。如图所示,由定点O作出固定坐标系Oxyz和固连于刚体的动坐标系Ox′y′z′。以轴Oz和Oz′为基本轴,其垂直面Oxy和Ox′y′为基本平面。由轴Oz量到Oz′的角θ称章动角。平面zOz′的垂线ON称节线,它又是基本平面Ox′y′和Oxy的交线。在右手坐标系中,由ON的正端看,角θ应按逆时针方向计量。由固定轴Ox量到节线ON的角ψ称旋进角;由节线ON量到动轴Ox′的角j称自转角。由轴Oz和Oz′正端看,角ψ和j也都按逆时针方向计量。若令Ox′y′z′的初始位置与Oxyz重合,经过相继绕Oz、ON和Oz′的三次转动后,刚体将转到图示的任意位置。如果刚体绕通过定点O的某一轴线以角速度ω转动,而ω在动坐标系Ox′y′z′上的投影为ωx′、ωy′、ωz′,则它们可用欧拉角及其微商表示如下:ωx′=  sinθsinj+ sinθsinj+ cosj,ωy′= cosj,ωy′= sinθcosj- sinθcosj- sinj,ωz′= sinj,ωz′= cosθ+ cosθ+ 。如果已知ψ、θ、j和时间的关系,则可用上式计算ω在动坐标轴上的3个分量;反之,如已知任一瞬时t的ω各个分量,也可利用上式求出ψ、θ、j和时间t的关系,因而也就决定了刚体的运动。上式通常被称为欧拉运动学方程。 。如果已知ψ、θ、j和时间的关系,则可用上式计算ω在动坐标轴上的3个分量;反之,如已知任一瞬时t的ω各个分量,也可利用上式求出ψ、θ、j和时间t的关系,因而也就决定了刚体的运动。上式通常被称为欧拉运动学方程。
|
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条