3) parametric human modeling

参数化人体建模
1.
Based on parametric human modeling technology, this article mainly discusses the digitalization of human geometric morphology.
人体形态学是人类学的一个重要组成部分,本文立足于参数化人体建模技术,主要研究人体外部几何形态的数字化问题。
4) The modeling technology based on parametric feature
特征实体参数化建模技术
5) parameterized modeling
参数化建模
1.
Based on featured CAD parameterized modeling technology and its application;
基于特征的CAD参数化建模技术及其应用
2.
3D parameterized modeling system of valve body casting based on ObjectARX;
基于ObjectARX的阀体铸件三维参数化建模系统
3.
3D Parameterized Modeling and Analysis on Capability of Reducer;
减速器三维参数化建模及其性能分析研究
6) parametric modeling
参数化建模
1.
Research and Application of Scroll Parametric Modeling Based on UG;
基于UG的涡盘参数化建模技术研究与实现
2.
The Application of Secondary Development in the Parametric Modeling Based on ANSYS;
二次开发在ANSYS参数化建模中的应用
3.
The 3D Parametric Modeling for the Electrolysis Abrasive Finishing Machine Based on Pro/E;
基于Pro/E的电解机械复合抛光机三维参数化建模研究
补充资料:SL1126内燃机零部件数字化建模
1、 SL1126内燃机总成
SL1126内燃机是由机体总成、缸盖总成、运动机构总成,其它机构总成等组成,见图I。
(1)机体总成主要由:机体、油底壳、风扇、油标、同步齿轮室盖、主副曲轴轴承盖、标尺及相应的标准零件。在机体总成中,机体是主要的设计零件。
(2)气缸盖总成主要包括的零件有:气缸盖、缸盖罩、喷油嘴、机油筒、空气滤清器等零件;其中气缸盖是主要设计零件。
(3)运动机构总成由活塞,滑块,活塞销,连杆,连杆配件,主、副曲轴总成,正视齿轮总成,凸轮轴总成以及气门挺杆总成等组成。
(4)其他机构总成有:机油泵总成,喷油泵总成等组成。
SL1126内燃机是由机体总成、缸盖总成、运动机构总成,其它机构总成等组成,见图I。
(1)机体总成主要由:机体、油底壳、风扇、油标、同步齿轮室盖、主副曲轴轴承盖、标尺及相应的标准零件。在机体总成中,机体是主要的设计零件。
(2)气缸盖总成主要包括的零件有:气缸盖、缸盖罩、喷油嘴、机油筒、空气滤清器等零件;其中气缸盖是主要设计零件。
(3)运动机构总成由活塞,滑块,活塞销,连杆,连杆配件,主、副曲轴总成,正视齿轮总成,凸轮轴总成以及气门挺杆总成等组成。
(4)其他机构总成有:机油泵总成,喷油泵总成等组成。
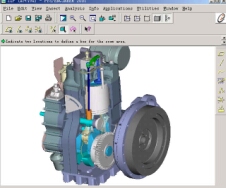
图I SL1126内燃机总成
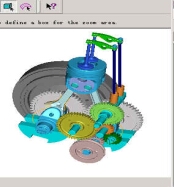
图II 内燃机运动机构总成
2、自顶向下设计的参数化技术
在CAD中,参数化技术是采用参数预定义的方法建立图形的集合约束集,指定一组尺寸作为参数使其与几何约束集相关联,并将所有的关联式融入到应用程序中,然后以人机交互方式修改参数尺寸,通过参数化尺寸驱动实现对设计结果的修改。参数化设计过程中,参数与设计对象的控制尺寸有明显的对应关系,并具有全局相关性。参数化设计不同于传统的设计,它储存了设计的整个过程,能设计出一族而非单一的在形状和功能上具有相似性的产品模型。正是有了这种参数化建模技术,才使得数据的改变在不同层次(如不同的子装配系统和不同的零件)之间的传递变得唯一个即时。这样,才有了真正意义上的自顶向下设计及以这种设计为基础的并行设计,后者是团队设计的基础。
下面以主同步齿轮零件三维参数化为例:
下面为渐开线方程:
alpha=20
m=4
z=46
r0=0.5*m*z*cos(20)
t0=t*40
x0=(cos(t0)+t0*pi/180*(sin(t0)))*r0
y0=(sin(t0)-t0*pi/180*(cos(t0)))*r0
theta=-(tan(alpha)-alpha*pi/180)*180/pi-90/z
x=x0*cos(theta)-y0*sin(theta)
y=x0*sin(theta)+y0*cos(theta)
z=0
其中alpha为压力角, m为模数, z为齿数, r0为基圆半径。

图III 齿轮总成
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条