 专业词汇(按中图法分类)
专业词汇(按中图法分类)
1) electric power steering

电动转向
1.
Study of electric power steering based on BP network;
基于BP网络的电动转向助力特性研究
2.
Review on automotive electric power steering system development;
汽车电动转向技术发展综述
3.
The principle and structure of electric power steering system on remote vehicle under single-chip microcomputer controlling is investigated in this thesis, and its control arithmetic and control circuit is described in details.
介绍了单片机控制的遥控汽车电动转向系统的工作原理和结构特点,并详细描述了其控制算法和控制电路。
2) electric power steering
电动转向器
1.
This paper confirms the power-assisted characteristic curve of EPS(electric power steering).
从研究探讨助力特性曲线出发,确定了电动转向器(Electronic Power Steering,简称EPS)的助力特性曲线,设计了助力控制器以达到电动助力转向的控制目标,通过仿真和分析的结果表明,加入助力控制器的电动转向器系统提高了转向的轻便性和平稳性。
2.
An electric power steering can take a multi-object control according to the status of the automobile movements and the driver s requirements.
电动转向器是一种新型的汽车转向系统,该系统能根据车辆的运动状况和驾驶员的要求实行多目标控制,以获得较强的路感、较轻的操纵力、较好的回正稳定性和回正速度、较强的抗干扰能力和较快的响应转向输入,而且这些控制是在基本上不改变硬件的条件下通过软件即可实现。
3) motor steering
电动机转向
4) Electronic power steering gear
电动动力转向器
5) electric power steering
电动助力转向
1.
μ analysis and synthesis of electric power steering control system;
电动助力转向控制系统的μ分析与综合
2.
Steering torque direct control strategy for vehicle electric power steering system;
汽车电动助力转向系统转向盘转矩直接控制策略
3.
Control method of electric power steering system based on phase compensation;
基于相位补偿的电动助力转向系统控制方法
6) electro-hydraulic steering
电液动力转向
1.
This paper presents a kind of electro-hydraulic steering system.
介绍了一种电液动力转向系统。
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
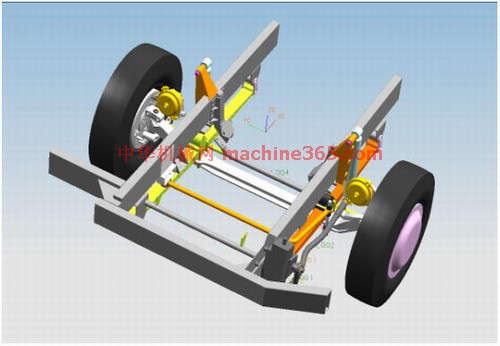
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
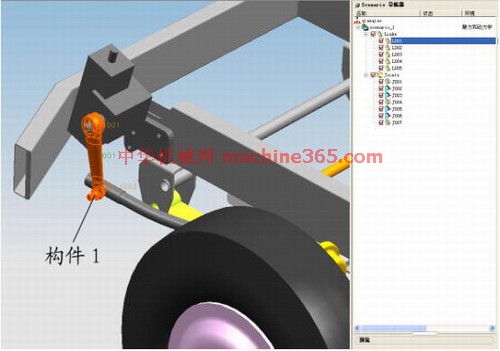
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
