1) Elliptical mirror
椭球面镜
2) ellipsoidal mirror focusing
椭球面镜聚焦
3) ellipsoid
椭球
1.
The research of Fraunhofer diffraction from the ellipsoid model;
椭球模型的夫琅和费衍射的研究
2.
The surface charge density and electric field strength of charged ellipsoid conductor;
带电导体椭球表面的电荷密度与电场
3.
The criteria of conflict overlap of any two ellipsoidal aggregates are proposed based on a volume-index, and a numerical method of three-dimensional random aggregate model is realized.
提出了针对颗粒夹杂为椭球形状并呈随机分布的多相复合材料的三维有限元网格的建立方法,为复合材料细观结构研究提供了一种全自动的建模工具。
4) prolate spheroid
椭球
1.
The variation of the 3-dimensional structures of flow separation with Reynolds number for a prolate spheroid;
绕椭球三维流动的分离结构随雷诺数的变化
2.
Investigation of separate flow around a prolate spheroid in laminar and turbulent flow by an improved oil-flow visualization technique;
改进油流显示法研究层流和湍流下绕椭球分离流
5) ellipsoid surface
椭球面
1.
Discussion on NC Turing method of the ellipsoid surface;
椭球面数控车削方法的探讨
2.
And it pur forward a new type of computing on the ellipsoid surface or deviating from the ellipsoid surface.
本文建立了椭球面上或偏离椭球面的经纬线长度、曲率半径、龙骨弯曲方向等几何参数的计算模型和方法。
6) ellipsoidal surface
椭球面
1.
This digital terrain model (DTM) based on the ellipsoidal surface is essentially different from DTM based on projected plane because the Delaunay triangulation net is built based on geodesic coordinate system on regional ellipsoidal surface.
在椭球面上构建Delaunay三角网,与在平面上构网有不完全相同的定义与算法。
2.
In order to overcome the crack,imprecision of geographic analysis and data redundancy caused by the traditional digital elevation model in modeling the large scale terrain, this paper presents a method of global digital elevation modeling based on hierarchical subdivision of the quaternary triangular mesh on ellipsoidal surface.
针对传统的DEM在模拟表达大面积地形时具有存在裂缝、地理分析不精确、数据冗余等问题,在椭球面四元三角格网QTM层次剖分的基础上,提出了一种基于椭球面三角格网层次剖分的数字高程建模方法,该方法避免了上述缺陷。
参考词条
补充资料:球面镜
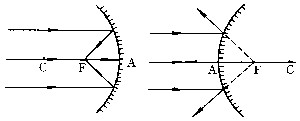
| 球面镜 spherical mirror 反射面为球面的反射镜 。分凹球面镜和凸球面镜两种。同心光束(见理想光学系统)经球面镜反射后严格说来反射光并不交于同一点,因而球面镜不能理想成像。但对傍轴光线,反射光可近似看成同心光束,故在傍轴条件下球面镜可当作成像元件。球面镜受光部分的中心点A称为顶点,A与球心C的连线称为主光轴。沿主光轴入射的平行光束经球面镜反射后会聚于F点,称为焦点。凹面镜的焦点为实焦点,凸面镜的焦点为虚焦点(见图)。焦点至顶点的距离称为焦距,用f表示。球面反射镜傍轴成像公式为 
式中s为主光轴上物点至顶点的距离,称为物距;s′为主光轴上像点至顶点的距离,称为像距;r为球面的曲率半径。s、 s′和r的正负号由下述法则决定:①物点为实物点时,s>0;物点为虚物点时,s<0。②像点为实像点时,s′>0;像点为虚像点时,s′<0(见物和像)。③对凸面镜,r>0;对凹面镜,r<0。由焦距定义  ,对凹面镜,f>0 ,为实焦距;对凸面镜,f<0,为虚焦距。凹面镜成像时 ,远物(位于凹面镜曲率中心以外)得实像,近物(位于曲率中心和顶点之间)得放大的虚像;对凸面镜,实物总得缩小虚像。 ,对凹面镜,f>0 ,为实焦距;对凸面镜,f<0,为虚焦距。凹面镜成像时 ,远物(位于凹面镜曲率中心以外)得实像,近物(位于曲率中心和顶点之间)得放大的虚像;对凸面镜,实物总得缩小虚像。 |
说明:补充资料仅用于学习参考,请勿用于其它任何用途。