1) forward dynamics

正向动力学
1.
The biomechanics of the lower limbs of a human were analyzed using a forward dynamics model which combines musculotendon dynamics and muscle excitation-contraction dynamics.
为探讨运动生物力学建模与分析的基础性问题,以下肢步态为研究对象建立了包含神经兴奋肌肉收缩动力响应和肌肉肌腱动力特性在内的下支系统正向动力学分析模型,并针对自然步态的运动过程,采用参数最优化方法进行了模拟计算。
2.
Some basic research issues of biomechanics modeling and analysis were discuissed using a forward dynamics model of the metacarpophalangeal (MCP) joint of the index finger, which combines musculotendon dynamics and muscle excitation contraction dynamics.
为探讨运动生物力学建模与分析的基础性问题 ,以食指为研究对象建立了包含神经兴奋 -肌肉收缩动力响应和肌肉 -肌腱动力特性在内的食指掌指关节正向动力学模型 ,并针对该关节快速屈曲 6 0°的运动过程 ,采用参数最优化方法进行了模拟计算。
2) Forward and inverse dynamics
正、反向动力学
3) forward dynamics
正动力学
1.
Research in parallel computations for the forward dynamics of flexible manipulators;
柔性机械臂正动力学并行计算研究
2.
This paper presents an efficient parallel algorithm for rigid manipulator forward dynamics.
本文提出了一种刚性臂正动力学有效的并行算法。
3.
An augmented computational model for the forward dynamics is developed by using the Jourdain principle and the vector of Lagrange multipliers.
利用Jourdain原理来消除约束反力,并通过引入Lagrange乘子释放约束,得到了机械臂正动力学非递推形式的计算模型。
4) forward kinematics
正向运动学
1.
The Implementation of Skeletal Animation Engine Based on Forward Kinematics and Keyframing System
正向运动学和关键帧系统的骨骼动画引擎实现
2.
The closed forward kinematics is described in three quadratic equations by the three Rodridgues parameters based on fundamental theory of parallel mechanism.
运用3个罗德里格参数描述3-DOF转动柔索驱动风洞角度机构的旋转矩阵,基于并联机构的基本理论将机构的正向运动学用罗德里格参数表达为3个二次方程的解析形式。
5) dynamics direct solution
动力学正解
6) Inverse dynamics
逆向动力学
1.
At last, an inverse dynamics correction approach is used to correct the “super-elasticity” effect of linear elastic models.
通过定义与模型对应的刚体核,并且向模型中添加一种新的广义弹簧,保持了与表面网格模型对应的几何体体积和形状等几何特征;采用形状匹配技术实现了整体性形变效果的模拟;最后使用逆向动力学方法对线弹性模型的“超弹性”现象进行修正。
2.
However,in order to obtain the joint torque and inverse dynamics by inputting kine- matic,the ground reaction force (GRF) and anthropometric data must be conducted.
要获得关节力矩数值,需同步测量运动学和地面反作用力参数,并通过逆向动力学(Inverse Dynam- ic)过程方能求得。
3.
The aim of this study is to explore the reliability of accuracy in calculating joint inside force of inverse dynamics.
采用同步测力、测加速度和多机多分辨率摄像的技术,并对解析原始数据运用"积分平滑"等一系列手段,用以提高逆向动力学计算关节内力的精确性,并且与目前常规逆向动力学方法的计算结果相比较,探讨用这两种不同方法所得结果的可靠性。
补充资料:动力机械:内燃机动力学
研究内燃机运转中的力学现象的科学。其主要任务是研究分析内燃机运转时各主要零件的运动规律及其受力情况﹐用以作为内燃机零件设计﹑计算的依据。它还研究这些力对内燃机动力装置的影响及其消减方法。内燃机动力学的主要内容为曲柄连杆机构运动学﹑曲柄连杆机构动力学和内燃机平衡分析等。
曲柄连杆机构运动学 研究曲柄﹑连杆﹐尤其是活塞的运动规律。活塞作周期性往复运动时的位移 、速度
、速度 和加速度
和加速度 可用下述各式近似求算
可用下述各式近似求算
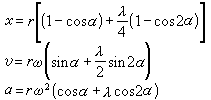
式中为曲轴转角﹔  为曲轴旋转角速度﹔
为曲轴旋转角速度﹔ 为曲柄半径﹔
为曲柄半径﹔ 为曲柄半径 与连杆长度
为曲柄半径 与连杆长度 之比﹐即 = /
之比﹐即 = /
曲柄作回转运动﹐连杆作复杂的平面运动。连杆的运动往往被简化分解为随活塞组的往复运动和随同曲柄的旋转运动。
曲柄连杆机构动力学 研究分析曲柄连杆机构(见曲柄滑块机构)在运动中力的生成﹑传递和输出。作用在曲柄连杆机构上的力有曲柄连杆机构运动时产生的往复惯性力和离心惯性力﹐以及内燃机气缸内的气体压力。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条