1) motion analysis camera,MAC

运动分析摄象机
2) camera motion classification
摄像机运动分类
3) IDCS
图象分析摄影机系统
4) perturbation analysis
摄动分析
1.
The perturbation calculation method avoids the modal truncation errors caused by the FEM-based matrix perturbation method,thus enhancing the accuracy of perturbation analysis results.
该方法在用于一维结构系统动力响应问题的摄动分析时,不需要按振型展开,避免了基于有限元的矩阵摄动方法所带来的模态截断误差问题,提高了分析结果的精度。
2.
The buckling and post-buckling of a unilateral constrained circular plate subjected to edge thrust and lateral pressure is presented using the perturbation analysis and the shooting method.
利用摄动分析结合打靶法,分析了具有单侧表面约束的圆板,在面内压力与横向力联合作用下发生屈曲和过屈曲问题,得到了在一系列横向力作用下周边固支和简支圆板的过屈曲路径。
3.
A new algorithm based on the perturbation analysis method for Window now control incomputer communication networks is described.
建立了一种基于摄动分析方法的窗口流控新算法,给出了各种负载条件下的仿真实验结果。
5) infinitesimal perturbation analysis
摄动分析
1.
Based on no-preemptive priority queuing network model,new infinitesimal perturbation analysis schemes were presented to estimate the dynamic time performance of DMS based on Common Ojbect Request Broker Architecture(CORBA) and Dimensional Measurement Interface Standard(DMIS).
针对基于公共对象请求代理结构和尺寸测量接口规范的分布式测量系统,根据多用户非抢占优先排队网络静态性能模型,提出基于无穷小摄动分析的分布式测量系统动态性能评价算法。
2.
Based on the no-preemptive priority queuing network model and infinitesimal perturbation analysis theory,the partition schemes of sample paths are proposed.
针对基于CORBA(Common object request broker architecture)和尺寸测量接口标准(Dimensional measurement interface standard,DMIS)的分布式测量系统(Distributed measurement system,DMS),根据多用户非抢占优先排队网络静态性能模型,提出基于无穷小摄动分析的样本轨道划分方法,建立测量系统服务窗口的动态调度算法,实现测量系统的时间性能调优。
3.
Based on no-preemptive priority queuing network model and infinitesimal perturbation analysis schemes,new dynamic scheduling algorithm is presented.
针对基于CORBA和DMIS的分布式测量系统,根据多用户非抢占优先排队网络静态性能模型,提出基于无穷小摄动分析(Infinitesimal Perturbation Analysis,IPA)的分布式测量系统服务窗口动态调度算法。
6) computerized simulation/perturbation analysis
计算机化仿真/摄动分析
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
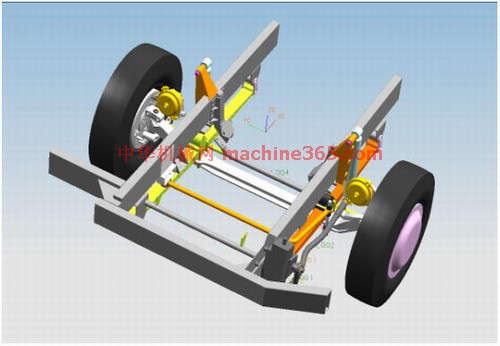
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
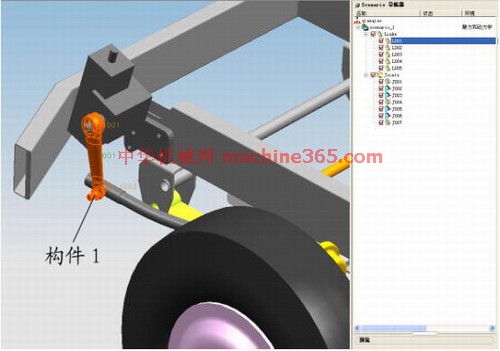
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条