1) minimum gain theory

最小增益原理
2) small gain theory
小增益原理
4) small gain theorem
小增益定理
1.
Adaptive dynamic surface control of nonlinear systems via small gain theorem;
基于小增益定理的非线性系统的自适应动态面控制
2.
Then the range of feedback coefficient is received by using the small gain theorem to get system global asymptotic stable,thereby ensuring the disappearance of chaos.
对于一类混沌金融系统,设计了3种不同的线性反馈控制,根据小增益定理,得到了系统状态反馈系数的取值范围,使得系统在该反馈控制下全局渐近稳定,从而保证混沌消失,这样有效地控制了系统,为政府及时采取适当可行的经济政策和调整力度提供了理论依据。
5) small gain theorem
小增益理论
1.
This paper presents a robust adaptive fuzzy trajectory linearization control(RAFTLC) based on the small gain theorem for a class of nonlinear multi-input multi-output(MIMO) uncertain systems.
针对一类非线性多输入多输出不确定系统,基于小增益理论提出了鲁棒自适应模糊轨迹线性化控制方法。
6) minimal controller gain
最小反馈增益
补充资料:机械原理:机械增益
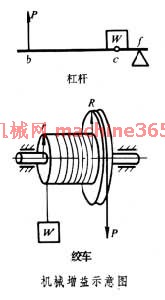 机械增益
机械增益机械中载荷与驱动力的比值﹐它表徵机械增力的程度。槓桿是最简单的省力装置(见图 机械增益示意图 )﹐是支点﹐P 表示作用在点的力﹐W 是作用在点上的载荷。当槓桿处於平衡状态时﹐如不计摩擦则根据力矩平衡关係可得
机械增益=W /P =bf/ cf
显然﹐点离支点的距离越小越省力。利用这一个原理可製成许多起重设备﹐绞车就是其中的一种。半径为R 的轮与半径为的捲筒都固定在转轴上。作用力P 通过轮缘槽裡的绳子提昇载荷W ﹐如不计摩擦损失﹐则作用力矩PR 等於阻力矩W ﹐由此关係可求得
绞车的机械增益=W /P
=R / r
此外﹐滑车和螺旋等也都是省力机械。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条