1) change train

转化轮系
1.
The calculation of transmission rate or rotation rate to cyclic train using the way of motion analysis of theoretical mechanics makes concepts understanding more easily and fewer mistakes than using the way of change train of mechanism theory.
利用理论力学中的运动分析方法对周转轮系进行传动比或转速的计算 ,较机械原理中的转化轮系法 ,概念清晰且不易出
2) epicyclic train
周转轮系
1.
Synthetic graphic method for the selection of basic transmission ratio of H typed closed epicyclic train;
H封闭式周转轮系基础传动比选择的综合曲线图法
2.
Innovative design on epicyclic train for the synchronized belt transmission of duplicated tie rod;
复式系杆同步带传动周转轮系的创新设计
3) epicyclic gear train
周转轮系
1.
A study on the evolution and association of epicyclic gear train;
周转轮系的演化与组合研究
2.
A study on computing method of transmission ratio of complex epicyclic gear trains;
复杂周转轮系传动比计算方法研究
3.
A study on the design of closed epicyclic gear trains with larger reduction ratio;
大减速比封闭式周转轮系的设计研究
4) epicyclical gear train
周转轮系
1.
The complicated structure of the epicyclical gear train with multidegrees of freedom and planet carriers could be predigested into the topological graph by adopting the knowledge of graph theory.
利用图论知识,可将多自由度多行星架周转轮系的复杂结构简化为拓扑图。
2.
With the epicyclical gear trains of K-H type as the units, which are the simplest gear trains,and by the method of constructing building blocks, new epicyclical gear trains can be obtained.
最简单的周转轮系是 K-H型轮系,以这种轮系为单元体,采用搭积木的方法可以构成新的周转轮系,组合的方法不同,将得到不同特性的轮系。
5) rotating wheel system
转轮系统
6) Activity Wheel
轮转系统
补充资料:传动:轮系
由一系列轮子组成的传动系统。这些轮子通常是齿轮﹐也可以是摩擦轮等。按轮系中各齿轮的几何轴线是否固定可分为定轴轮系和行星轮系。
定轴轮系 各轮的几何轴线位置都固定不动﹐它的传动比为
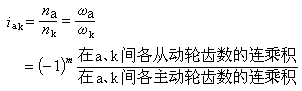
式中na﹑nk和wa﹑wk分别为齿轮a和齿轮k的转速和角速度﹔係数(-1)m中的m为该轮系中外嚙合齿轮对数﹐m为偶数时﹐係数为正值﹐表示主动轮和从动轮转向相同﹔m为奇数时﹐係数为负值﹐表示主动轮和从动轮转向相反。m只适用於平行轴的定轴轮系。定轴轮系主要适用於下列情况﹕(1)大的传动比。一般一对齿轮的传动比不宜过大﹐例如要求实现传动比为100﹐若仅用一对齿轮﹐则大轮直径将为小轮直径的100倍﹐若採用三级的轮系﹐则大轮直径可大为减小。(2)较大的轴间距。如两轴距离较大﹐採用一对齿轮传动﹐则两齿轮直径势必很大。若在中间加一个或几个齿轮﹐齿轮尺寸即可缩小。(3)变速或变向﹐用变速机构改变轮系的传动比(见变速器)以实现变速﹔或设置中间轮以改变从动轴的转向。这种只改变从动轮转向不改变原传动比大小的中间轮称为惰轮。(4)用一个主动轴带动若干要求不同转速﹑转向的从动轴﹐或用若干从动轴带动同一主动轴。定轴轮系的效率等於串联的各对齿轮传动效率的连乘积。
行星轮系 其特点﹑应用﹑传动比和效率参见行星齿轮传动。
定轴轮系 各轮的几何轴线位置都固定不动﹐它的传动比为
式中na﹑nk和wa﹑wk分别为齿轮a和齿轮k的转速和角速度﹔係数(-1)m中的m为该轮系中外嚙合齿轮对数﹐m为偶数时﹐係数为正值﹐表示主动轮和从动轮转向相同﹔m为奇数时﹐係数为负值﹐表示主动轮和从动轮转向相反。m只适用於平行轴的定轴轮系。定轴轮系主要适用於下列情况﹕(1)大的传动比。一般一对齿轮的传动比不宜过大﹐例如要求实现传动比为100﹐若仅用一对齿轮﹐则大轮直径将为小轮直径的100倍﹐若採用三级的轮系﹐则大轮直径可大为减小。(2)较大的轴间距。如两轴距离较大﹐採用一对齿轮传动﹐则两齿轮直径势必很大。若在中间加一个或几个齿轮﹐齿轮尺寸即可缩小。(3)变速或变向﹐用变速机构改变轮系的传动比(见变速器)以实现变速﹔或设置中间轮以改变从动轴的转向。这种只改变从动轮转向不改变原传动比大小的中间轮称为惰轮。(4)用一个主动轴带动若干要求不同转速﹑转向的从动轴﹐或用若干从动轴带动同一主动轴。定轴轮系的效率等於串联的各对齿轮传动效率的连乘积。
行星轮系 其特点﹑应用﹑传动比和效率参见行星齿轮传动。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条