1) flexible single link

单柔性杆
2) single-link flexible robotic arm
单杆柔性机械臂
3) elastic inside link
柔性连杆
1.
To obtain the kinematic and dynamic characteristic of planar 3-RRR parallel robot with elastic inside links,operating at higher speed,a kinetoelasto-dynamic(KED)model is proposed.
为了描述包含柔性连杆的平面柔性3-RRR并联机器人的运动学、动力学特性,需要建立机器人的弹性动力学模型。
4) Cutterbar flexiblity
刀杆柔性
6) flexible link
柔性杆
1.
Based on the dynamics of flexible multi-body system,a dynamic model for underactuated robot with flexible links was presented using assumed mode method.
根据欠驱动机器人的结构特点,以柔性多体系统动力学理论为基础,采用便于实时控制的假设模态方法,建立了具有柔性杆件的欠驱动机器人的动力学模型。
2.
In this paper,a 3DOF underactuated planar manipulator with flexible links is taken an example and its con- trollable analysis is performed by two steps.
本文以具有柔性杆的3DOF平面欠驱动机器人为例,分两步分析系统的可控性。
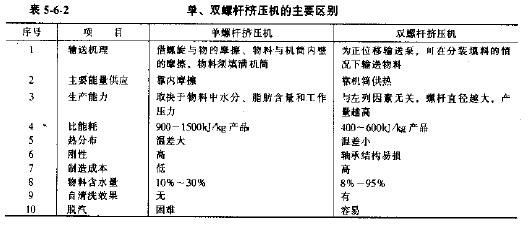
补充资料:单、双螺杆挤压机
| 单、双螺杆挤压机 | |
|


说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条