1) Variable Speed Technology

无级变速技术
1.
Development and Prospect on Variable Speed Technology;
无级变速技术的发展与展望
2) continuously variable transmission
无级变速
1.
Actuality and development of Technologies in Automobile Continuously Variable Transmission;
汽车无级变速技术的发展现状及展望
2.
Research and Emulation of the RX Continuously Variable Transmission;
环锥行星式(RX)无级变速传动的研究及仿真
3) stepless speed
无级变速
1.
In order to overcome the problem that the traditional controller of torpedo is not suitable for wide speed scope of stepless speed torpedo,an adaptive sliding-mode controller is developed for stepless speed torpedo to realize longitudinal,lateral and axial accurate control.
为了解决无级变速鱼雷由于速度的大范围变化给其精确控制带来的困难,该文将具有理想鲁棒性的滑模控制与自适应控制结合起来,设计出自适应滑模控制器,从而实现了无级变速鱼雷纵向、侧向和轴向的精确控制。
2.
The differential device with stepless speed regulation, which is composed of a mechanical stepless speed governor and a planetary differential device, has many advantages.
利用机械式无级变速器与行星差速器组合成无级调速差动机构,具有许多优点。
4) CVT
无级变速
1.
Design and Research of CVT for Motorcycle;
摩托车无级变速系统的设计研究
2.
Experiment Study on Electro-hydraulic Control System of Metal V-belt Type CVT;
金属带式无级变速器电液控制系统的试验研究
3.
Modeling and Performance Simulation of Vehicle Equipped with Metal Belt Driven CVT;
金属带式无级变速汽车的建模与性能仿真
5) continuously variable transmission (CVT)
无级变速
1.
The cause of the deviation of a V belt from its correct position in a metal V belt continuously variable transmission (CVT) of double cone discs with straight generatrix was investigated.
分析了具有中间挠性元件的直母线双锥盘无级变速传动中 ,带的非正常偏移产生的原因 ,确定在直母线锥盘的条件下产生中间挠性元件非平行移动是必然的·应用啮合理论 ,提出解决这一问题的唯一方法是采用一对共轭的曲线作为挠性元件侧形和锥盘的母线·给出了求解方程和应用算例
6) stepless speed regulation
无级变速
1.
This paper puts forward a location control method for the elevator stepless speed regulation so as to realize the numerical ideal speed regulation.
本文提出一种无级变速位置控制模式,便于实现全数字化的理想速度运行。
2.
Based on in-depth study and model tests,a series of new measures and advanced techniques,such as stepless speed regulation by electro-hydraulic proportional control,two-way car- tridge valve control,double-direction load balancing circuit,multilevel protection for cylinder,optimal working combination of pumps,contamination control,and .
在深入研究和模型试验的基础上,其大功率液压控制系统的设计采用了诸如电液比例无级变速、二通插装阀控制、双向负载平衡回路、油缸多级保护阀块、油泵工作组合优化、液压系统污染控制及运行状态监测和故障诊断等一系列的新方法和先进技术,满足了设备复杂的运行工况和可靠性要求。
补充资料:传动:无级变速
能连续无级地改变输入轴与输出轴的传动比或输出轴转速的传动。按工作原理﹐无级变速传动可分为机械﹑液力﹑液压﹑气压和电力等型式。
机械无级变速 通常由传动机构﹑加压装置和调速机构3部分组成(图1 机械无级变速的基本型式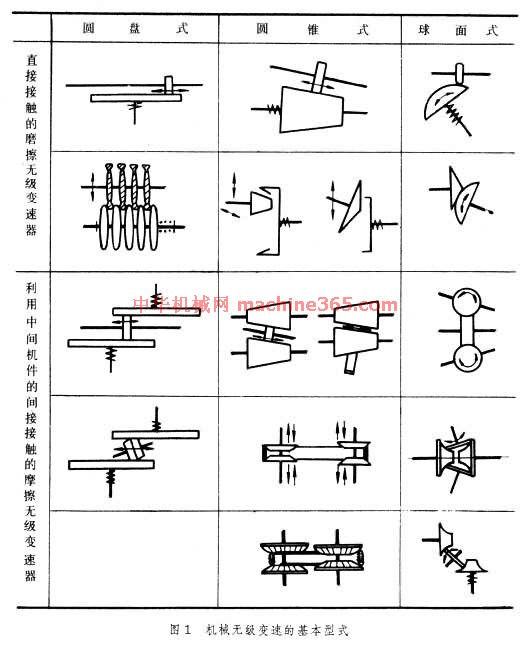 )。大多利用摩擦传动实现变速。图2 锥盘带式无级变速器
)。大多利用摩擦传动实现变速。图2 锥盘带式无级变速器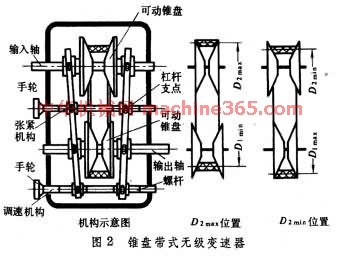 为锥盘带式无级变速器﹐它靠带与锥盘间的压紧力產生的摩擦力来传递动力。压紧力由加压装置產生。张紧机构即为加压装置﹕旋动手轮使螺杆转动﹐则调速机构中的两个槓桿支点靠近﹐使带张紧而压锥盘。在输入轴和输出轴上各自相向安装著一对可动锥盘。二者形成的V形槽宽﹐都能因可动锥盘的轴向移动而改变。当旋动调速机构手轮使螺杆转动﹐通过槓桿使输入轴上两个锥盘靠近时﹐输出轴上两个锥盘即离开。反之﹐前者离开﹐后者靠近。这样就始终保持绕过输入轴和输出轴上两对锥盘的带处於张紧状态﹐但改变了主﹑从动轮与带的接触半径而达到变速的目的。若输入轴转速为常量n1﹐在D2max位置时输出轴转速最低﹐n2min小於n1﹔在D2min位置时输出轴转速最高﹐n2max大於n1。若用R b表示变速范围﹐则
为锥盘带式无级变速器﹐它靠带与锥盘间的压紧力產生的摩擦力来传递动力。压紧力由加压装置產生。张紧机构即为加压装置﹕旋动手轮使螺杆转动﹐则调速机构中的两个槓桿支点靠近﹐使带张紧而压锥盘。在输入轴和输出轴上各自相向安装著一对可动锥盘。二者形成的V形槽宽﹐都能因可动锥盘的轴向移动而改变。当旋动调速机构手轮使螺杆转动﹐通过槓桿使输入轴上两个锥盘靠近时﹐输出轴上两个锥盘即离开。反之﹐前者离开﹐后者靠近。这样就始终保持绕过输入轴和输出轴上两对锥盘的带处於张紧状态﹐但改变了主﹑从动轮与带的接触半径而达到变速的目的。若输入轴转速为常量n1﹐在D2max位置时输出轴转速最低﹐n2min小於n1﹔在D2min位置时输出轴转速最高﹐n2max大於n1。若用R b表示变速范围﹐则

因为两轮尺寸相同﹐D1min=D2min﹐D1max=D2max﹐故
当所用的带为块带时﹐R b=2~10﹔用宽三角带时﹐R b=3~6﹔用一根或数根普通三角带时﹐R b=1.6~2.5。一般情况下﹐它传递的功率不大於 55千瓦﹐传动效率为0.8~0.9。
液力无级变速 以液体为工作介质的无级变速﹐一般由液力耦合器或液力变矩器实现变速。后者对载荷变化有良好的自动适应性。液力传动有良好的防振﹑隔振性能﹐但有时需要补偿系统和冷却系统。
机械无级变速 通常由传动机构﹑加压装置和调速机构3部分组成(图1 机械无级变速的基本型式
)。大多利用摩擦传动实现变速。图2 锥盘带式无级变速器 为锥盘带式无级变速器﹐它靠带与锥盘间的压紧力產生的摩擦力来传递动力。压紧力由加压装置產生。张紧机构即为加压装置﹕旋动手轮使螺杆转动﹐则调速机构中的两个槓桿支点靠近﹐使带张紧而压锥盘。在输入轴和输出轴上各自相向安装著一对可动锥盘。二者形成的V形槽宽﹐都能因可动锥盘的轴向移动而改变。当旋动调速机构手轮使螺杆转动﹐通过槓桿使输入轴上两个锥盘靠近时﹐输出轴上两个锥盘即离开。反之﹐前者离开﹐后者靠近。这样就始终保持绕过输入轴和输出轴上两对锥盘的带处於张紧状态﹐但改变了主﹑从动轮与带的接触半径而达到变速的目的。若输入轴转速为常量n1﹐在D2max位置时输出轴转速最低﹐n2min小於n1﹔在D2min位置时输出轴转速最高﹐n2max大於n1。若用R b表示变速范围﹐则 因为两轮尺寸相同﹐D1min=D2min﹐D1max=D2max﹐故
当所用的带为块带时﹐R b=2~10﹔用宽三角带时﹐R b=3~6﹔用一根或数根普通三角带时﹐R b=1.6~2.5。一般情况下﹐它传递的功率不大於 55千瓦﹐传动效率为0.8~0.9。
液力无级变速 以液体为工作介质的无级变速﹐一般由液力耦合器或液力变矩器实现变速。后者对载荷变化有良好的自动适应性。液力传动有良好的防振﹑隔振性能﹐但有时需要补偿系统和冷却系统。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条