1) steering error

转向误差
1.
Then, an optimization model of the rocker arms mechanism of auto-mobile crane aiming to minimize the steering error was established.
随后构建使摇臂机构转向误差最小的优化模型,考虑车辆的真实行驰状况引入加权函数,从而实现真实工作条件的仿真。
2) turning error
转向误差
1.
Utilizing the related transformation theory knowledge of spatial coordinates,kinematics analysis was carried out on the double rocker mechanism and the spatial mathematic model and the optimization model based on the minimum turning errors were established.
运用空间坐标变换理论的有关知识,对双摇臂机构进行运动学分析,建立空间数学模型和基于转向误差最小的最优化模型。
5) shafting ratdial rotating error
轴系径向回转误差
6) longitudinal form error
齿向误差
1.
The tooth profile error and longitudinal form error are calculated,and the change rule with setting angle of them is got.
针对花键的齿形误差和齿向误差,按照误差计算原理,得出了计算结果及其随安装角改变的变化规律。
2.
The features of involute gear profile are mapping analyzed, the principle and method of on machine measuring the longitudinal form error of bull gears with the rack probe is introduced, the data evaluation model of longitudinal form error is established, and a measuring example is given.
对渐开线齿轮廓面特性进行了映射分析 ,介绍了齿条刃边测头在机测量大型齿轮齿向误差的基本原理及测量方案 ,建立了齿向误差的数据评定模型 ,并给出了测量实
3.
With Pro/E and ANSYS,find the extremum of the main errors(site error and longitudinal form error of the gear) that influence the reliability of the whole mechanism and define reasonable tolerance so as to not only decrea.
针对微小型无返回力矩钟表机构,考虑微小型零件的加工工艺及该机构的高承载、高转速的恶劣工作工况,以有限元法与赫兹理论相结合,建立了包含制造误差的有限元力学模型,以Pro/E和ANSYS为工具,得出了主要影响机构运行可靠性的齿轮的齿向误差、位置误差极限,从而确定了微小型齿轮的合理公差,进而保证了该机构的运行的可靠性,并且在一定程度上降低了对加工工艺的要求,从而降低了加工成本,为微小型零件的公差制定提供了一定借鉴。
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
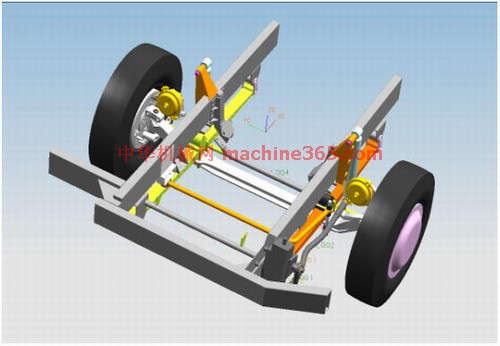
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
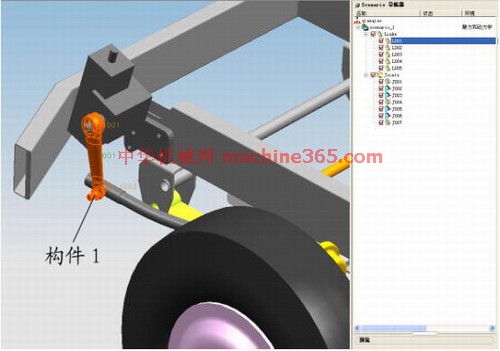
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条