1) passive dynamic walling

被动动力步行
2) passive dynamic walking
被动动态步行
1.
Reinforcement learning for passive dynamic walking robot;
基于再励学习的被动动态步行机器人
2.
The goal of passive dynamic walking research is to discover the essentialcharacteristics of biped walking.
被动动态步行是双足步行研究领域中的一个重要分支,其研究目的是对于步行现象本质特性的发掘,研究手段包括步态合成和步态分析方法。
3) passive synchronization
被动同步
1.
Study on passive synchronization of femtosecond and picosecond pulses in a Ti:sapphire laser
钛宝石激光器中飞秒和皮秒脉冲被动同步的研究
4) passive-dynamic
被动动力
1.
On the other hand, by analyzing the fish physiologicalstructure, the simulation model of passive-dynamic Robot Fish is established.
本文通过对比分析两足机器人高效运动的研究方法,提出了结合步行数据法和被动动力学法对仿生机器鱼的运动进行理论与仿真分析的新思路。
5) passive serial
被动串行
6) passive walking
被动行走
1.
Identifying fixed points in periodic gaits during passive walking
被动行走周期性步态不动点搜索的新算法
补充资料:动力机械:内燃机动力学
研究内燃机运转中的力学现象的科学。其主要任务是研究分析内燃机运转时各主要零件的运动规律及其受力情况﹐用以作为内燃机零件设计﹑计算的依据。它还研究这些力对内燃机动力装置的影响及其消减方法。内燃机动力学的主要内容为曲柄连杆机构运动学﹑曲柄连杆机构动力学和内燃机平衡分析等。
曲柄连杆机构运动学 研究曲柄﹑连杆﹐尤其是活塞的运动规律。活塞作周期性往复运动时的位移 、速度
、速度 和加速度
和加速度 可用下述各式近似求算
可用下述各式近似求算
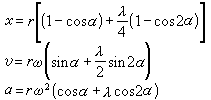
式中为曲轴转角﹔  为曲轴旋转角速度﹔
为曲轴旋转角速度﹔ 为曲柄半径﹔
为曲柄半径﹔ 为曲柄半径 与连杆长度
为曲柄半径 与连杆长度 之比﹐即 = /
之比﹐即 = /
曲柄作回转运动﹐连杆作复杂的平面运动。连杆的运动往往被简化分解为随活塞组的往复运动和随同曲柄的旋转运动。
曲柄连杆机构动力学 研究分析曲柄连杆机构(见曲柄滑块机构)在运动中力的生成﹑传递和输出。作用在曲柄连杆机构上的力有曲柄连杆机构运动时产生的往复惯性力和离心惯性力﹐以及内燃机气缸内的气体压力。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条