1) 3-free degree location organizations

三自由度定位机构
1.
The scheme and structure of its reflection organization and 3-free degree location organizations were designed.
介绍了移动式工作台热压机的总体方案设计过程,探讨移动式热压机的工作原理及机构设计,并对反光机构、三自由度定位机构进行方案及结构设计。
2) orthogonal 3-DOF spherical parallel mechanism
正交三自由度球面机构
3) Planar three-degree-of-freedom parallel manipulator
平面三自由度并联机构
5) the spherical 3-DOF parallel mechanism
三自由度并联球面机构
6) 3-dof spherical parallel manipulator
三自由度球面并联机构
补充资料:机械原理:机构自由度
机构自由度
使机构具有确定运动时所必须给定的独立运动数目。图 平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图
平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图 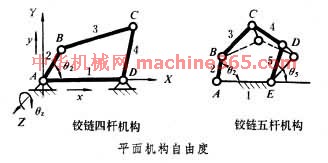 平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。
平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。
一般机构的自由度可凭经验根据几何位置关係直接决定﹐但常需要通过计算进行验证或作进一步分析。平面机构自由度数的计算公式为
F =3-2P 1-P h (1)
式中为一个平面机构中活动构件数(机架作为参考坐标系不计算在内)﹐每个活动构件有3个自由度﹐即图 平面机构自由度中沿X ﹑Y 轴的独立移动和绕轴的独立转动﹔P 1为低副数﹐每个低副引进2个约束﹐即限制2个自由度﹐其中转动副(如图 平面机构自由度 中A )限制x﹑y两个移动﹐移动副限制1个转动和另1个移动﹔P h 为高副数﹐每个高副只引进1个约束﹐即限制1个自由度。
应用平面机构自由度的计算公式时需要注意复合铰链﹐局部自由度和虚约束等几种情况。当几个转动副的轴线重合时称为复合铰链﹐在计算转动副数时不能遗漏。凸轮机构中从动件如带有滚子﹐滚子的自转运动即为局部自由度﹐在计算机构的自由度时应将局部自由度除去不计。机构中引进局部自由度的主要目的是为了减小磨损。虚约束是不起约束作用的约束﹐当一根轴用两个轴承而形成两个轴线并行的转动副时﹐其中一个即为虚约束。机构中引进虚约束仅仅是为了提高零件的刚度或渡过机构的死点﹐但对製造和安装的要求有所提高﹔否则虚约束就成为实约束﹐从而使机构產生卡住现象。
使机构具有确定运动时所必须给定的独立运动数目。图
平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图 平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。 一般机构的自由度可凭经验根据几何位置关係直接决定﹐但常需要通过计算进行验证或作进一步分析。平面机构自由度数的计算公式为
F =3-2P 1-P h (1)
式中为一个平面机构中活动构件数(机架作为参考坐标系不计算在内)﹐每个活动构件有3个自由度﹐即图 平面机构自由度
中沿X ﹑Y 轴的独立移动和绕轴的独立转动﹔P 1为低副数﹐每个低副引进2个约束﹐即限制2个自由度﹐其中转动副(如图 平面机构自由度 中A )限制x﹑y两个移动﹐移动副限制1个转动和另1个移动﹔P h 为高副数﹐每个高副只引进1个约束﹐即限制1个自由度。 应用平面机构自由度的计算公式时需要注意复合铰链﹐局部自由度和虚约束等几种情况。当几个转动副的轴线重合时称为复合铰链﹐在计算转动副数时不能遗漏。凸轮机构中从动件如带有滚子﹐滚子的自转运动即为局部自由度﹐在计算机构的自由度时应将局部自由度除去不计。机构中引进局部自由度的主要目的是为了减小磨损。虚约束是不起约束作用的约束﹐当一根轴用两个轴承而形成两个轴线并行的转动副时﹐其中一个即为虚约束。机构中引进虚约束仅仅是为了提高零件的刚度或渡过机构的死点﹐但对製造和安装的要求有所提高﹔否则虚约束就成为实约束﹐从而使机构產生卡住现象。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条