1) length of motion route

运动路径长度
1.
The formulas for the length of motion route is inferred based on the transpositional coordinate system.
根据超声振动辅助磨削运动图,分析了平面磨削时单颗磨粒的运动过程;给出了单颗磨粒相对于工件的运动方程,绘制了单颗磨粒的运动路径;通过坐标转化推导了单颗磨粒在磨削区运动路径长度计算公式;从连续切削刃的角度出发,利用VB和Matlab对其运动轨迹进行仿真,分析了超声振动辅助磨削为分离型磨削过程的影响因素。
2) path length
路径长度
1.
The local area control of virus spreading is studied in the light of the path length in complex networks,and the efficiency of local area control for complex networks with different topologies is analyzed.
从复杂网络的节点路径长度范围的角度来研究病毒传播的局域控制,分析了在不同拓扑结构的复杂网络中进行局域控制的有效性。
3) moving path
运动路径
1.
And the moving path variables are optimized with the complex algorithm.
为了提高机器人足球比赛中的成功率,在分析了基本算法不足的基础上,利用能够满足任意端点及其斜率要求的双圆弧曲线来解决机器人小车到达目标点的位置,以及姿态运动过程中遇到障碍物能够保持最佳姿态的射门问题,并利用优化设计中的复合形法进行了运动路径寻优。
2.
Both the distance of the moving path of the ball and the rotational angle of the attacker have been taken into account synthetically, thus the best shooting area is selected in the two high efficient areas.
为提高机器人足球比赛中射门的成功率,分析了守门员的死角,并用"死角"法求出了射门的高效区,在求出的两个高效区中综合考虑球的运动路径长短和我方机器人转动角度等因素,确定了最佳射门区域。
3.
The collision models of robots in moving path are constructed geometrically.
通过建立球场坐标系及机器人小车的运动轨迹坐标系,导出了旋转矩阵与平移矩阵,对球场坐标系和运动轨迹坐标系进行了坐标转换,并运用几何学方法建立了机器人在运动过程中的避碰模型,最后利用优化设计中的内点惩罚函数法对机器人小车进行了运动路径寻优。
4) motion path
运动路径
1.
Improved motion path editing;
一种改进的运动路径编辑方法
2.
And based on that rule, motion path of camera and its target were computed by computer.
通过对影像美学原则的分析制定规则,并利用该规则对相机主体及相机目标的运动路径进行自动计算,从而生成更有效的最终影像结果。
5) Total length of the moving
光点移动路径长度
6) path length
路径长度<测>
补充资料:长度测量工具:长度传感器
利用气动﹑电学﹑光学等原理和光电效应等将被测长度转换为空气的压力或流量﹑电量和光强等物理量﹐以获取测量信息的测量元件﹐用於某些长度测量工具中。长度传感器(以下简称传感器)主要由感受元件和转换元件组成。转换元件把感受元件感受的被测长度精确地转换为便於放大和处理的其他物理量。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器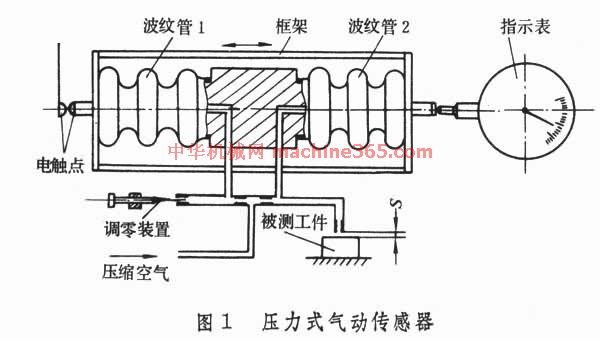 为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器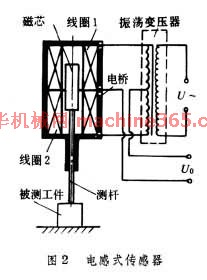 为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。 电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条