1) odometer localization and mapping representation

里程计定位和地图创建
2) simultaneously localization and mapping(SLAM)
同时定位和地图创建(SLAM)
3) simultaneous localization and mapping
同时定位和地图创建
1.
Rao-blackwellized particle filters for robot simultaneous localization and mapping;
Rao-Blackwellized滤波器实现机器人同时定位和地图创建
2.
Improved Rao-Blackwellized particle filters for mobile robot simultaneous localization and mapping;
用改进的Rao-Blackwellized粒子滤波器实现移动机器人同时定位和地图创建
3.
A hierarchical map representation approach based on active loop closure constraint is proposed to implement mobile robot simultaneous localization and mapping(SLAM)efficiently with the Rao-Blackwellized particle filters(RBPF).
基于Rao-Black wellized粒子滤波器提出了一种基于主动闭环策略的移动机器人分层同时定位和地图创建(si multaneous localization and mapping,SLAM)方法,基于信息熵的主动闭环策略同时考虑机器人位姿和地图的不确定性;局部几何特征地图之间的相对关系通过一致性算法估计,并通过环形闭合约束的最小化过程回溯修正。
4) SLAM
[英][slæm] [美][slæm]
同时定位和地图创建
1.
This paper introduced an improved PF-SLAM (particle filtering-SLAM) approach.
提出一种改进的粒子滤波SLAM(simultaneous localization and map building)同时定位和地图创建实现方法。
2.
Both uncertainty about the pose and the environment maps,simultaneous localization and map building(SLAM) becomes so complex in unknown environments.
针对未知环境中移动机器人同时定位和地图创建(Simultaneous Localization and Map Building,SLAM)由于机器人位姿和环境地图都不确定导致定位和地图创建变得更加复杂,提出一种局部最优(全局次优)参数法,即通过局部最优的位姿创建局部最优的环境地图,再通过局部最优的环境地图寻求局部最优的位姿,如此交替进行,直到得到全局确定性的位姿和确定性的环境地图。
5) Fast Simultaneous Localization and Map Building(FastSLAM)
快速同时定位和地图创建(FastSLAM)
6) simultaneous localization and mapping
同时定位与地图创建
1.
This paper surveys the latest progress of simultaneous localization and mapping (SLAM).
对移动机器人的同时定位与地图创建 (SimultaneousLocalizationandMapping)的最新研究进行了综述 。
2.
The simultaneous localization and mapping(SLAM) method is investigated based on the Scale Invariant Feature Transform(SIFT) algorithm.
研究了基于尺度不变特征变换(SIFT)算法的移动机器人同时定位与地图创建(SLAM)方法,即在视角改变情况下,用SIFT算法对不同图像进行特征匹配,根据极线几何原理得到摄像头的旋转角度,将之与里程计的角度信息融合,从而实现较准确的自我定位与地图创建。
3.
Finally, the problem of simultaneous localization and mapping (SLAM) for mobile robot navigation is introduced .
最后,对移动机器人导航中的同时定位与地图创建(SLAM) 问题作了阐述,指出SLAM研究面临的问题,探讨了SLAM的未来研究方向。
补充资料:AutoCAD脚本文件的创建和使用
1 脚本文件简介
脚本文件类似于DOS操作系统中的批处理文件,它可以将不同的AutoCAD命令组合起来,并按确定的顺序自动连续地执行。脚本文件是文本文件,扩展名为“.SCR”,用户可使用任一文本编辑器来创建脚本文件。
因为脚本文件可使一些命令序列自动执行,所以常用来产生、编辑或观看图形,如幻灯放映、初始的图形设置等。但脚本文件不能使用对话框或菜单,当从脚本文件中发出打开对话框命令时,AutoCAD运行该命令的命令栏含义而不是打开对话框。
用户可以通过命令行的开关设置,使AutoCAD在启动时自动调用脚本。此外,用户也可以在AutoCAD中运行脚本,其调用方式为:
菜单:【Tools(工具)】→【Run Script…(运行脚本)】
命令行:script(或别名scr)
注意 AutoCAD 的“undo”命令将每个脚本当作一个组,可以用单个“undo”命令放弃一组脚本的操作。
说明 “script”命令可透明地使用。
2 实例1 使用脚本文件绘制并显示图形
Step 1 创建脚本文件“exam_draw.scr”
(1) 使用Windows附件中的“记事本”程序创建一个新文件。
(2) 在该文件中添加如下内容,如图1所示。
脚本文件类似于DOS操作系统中的批处理文件,它可以将不同的AutoCAD命令组合起来,并按确定的顺序自动连续地执行。脚本文件是文本文件,扩展名为“.SCR”,用户可使用任一文本编辑器来创建脚本文件。
因为脚本文件可使一些命令序列自动执行,所以常用来产生、编辑或观看图形,如幻灯放映、初始的图形设置等。但脚本文件不能使用对话框或菜单,当从脚本文件中发出打开对话框命令时,AutoCAD运行该命令的命令栏含义而不是打开对话框。
用户可以通过命令行的开关设置,使AutoCAD在启动时自动调用脚本。此外,用户也可以在AutoCAD中运行脚本,其调用方式为:
菜单:【Tools(工具)】→【Run Script…(运行脚本)】
命令行:script(或别名scr)
注意 AutoCAD 的“undo”命令将每个脚本当作一个组,可以用单个“undo”命令放弃一组脚本的操作。
说明 “script”命令可透明地使用。
2 实例1 使用脚本文件绘制并显示图形
Step 1 创建脚本文件“exam_draw.scr”
(1) 使用Windows附件中的“记事本”程序创建一个新文件。
(2) 在该文件中添加如下内容,如图1所示。
注意 其中调用“exam_view.scr”文件的路径应根据实际情况而定。
(3) 以“exam_draw.scr”为名保存该文件。
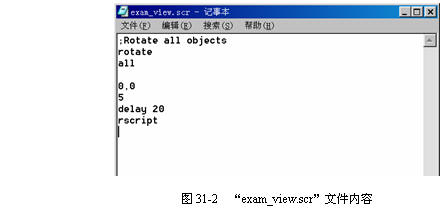
Step 2 创建脚本文件“exam_view.scr”
(1) 使用Windows附件中的“记事本”程序创建一个新文件。
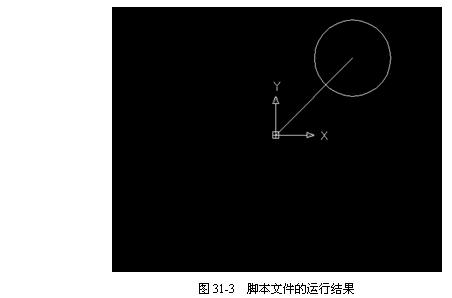
(2) 在该文件中添加如下内容,如图2所示。
(3) 以“exam_view.scr”为名保存该文件。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条