1) rotor harmonic magnetic field

转子谐波磁场
1.
The result shows that the rotor resistance and leakage impedance of BDFM with new rotor structure are small,and rotor harmonic magnetic field contents,corresponding with poles of stator power windings and control windings,are high;the other high-order harmonic magnetic field contents are low.
结果表明,新转子结构无刷双馈电机的转子电阻和漏电抗小,与定子功率绕组和控制绕组极数相对应的转子谐波磁场含量高,其他高次谐波磁场含量低。
2) Harmonic field
谐波磁场
1.
Harmonic field characteristic and components of the thrust are also studied.
以脉宽调制电压型逆变器供电的永磁直线同步电动机(PMLSM)为求解对象,用分离变量法求解电动机的电流解析表达式,在此基础上分析了电动机的谐波磁场特性及逆变器供电电源产生的推力谐波分量。
3) Harmonic magnetic field
谐波磁场
1.
Moreover, the induction voltage in the stator windings resulting from the harmonic magnetic field of the inductio.
分析了谐波转矩的产生及其对无刷双馈电机运行性能的影响,并分析了无刷双馈电机转子绕组感应电流产生的谐波磁场在定子绕组中的感应电压,以及定子绕组并联支路中环流的产生原因。
5) harmony wave
齿谐波磁场
6) harmonic electromagnetic field
谐波电磁场
1.
Based on the element-free Galerkin method(EFGM),the general discrete 3D model of A-φ-A govern equations of harmonic electromagnetic field was achieved in cylindrical coordinates.
在介绍无网格迦辽金法(Element-Free Galerkin Method,EFGM)基本原理的基础上,采用EFGM建立了应用A-φ-A法表示的谐波电磁场控制方程在圆柱坐标系下的通用三维离散模型。
补充资料:传动:谐波传动
由波发生器﹑柔性件和刚性件 3个基本构件组成的机械传动。这种传动是在波发生器的作用下﹐使柔性件產生弹性变形并与刚性件相互作用而达到传递运动或动力的目的。在传动中波发生器迴转一周﹐柔性件上某一点循环变形的次数称波数。柔性件的变形过程是一个基本对称的谐波(图1 双波柔轮的变化波形 )﹐故称为谐波传动。常用的谐波传动是双波传动。
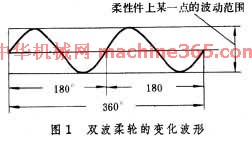
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。

谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。
谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条