1) flow sensing system

流量传感系统
1.
The flow sensing system by the flow sensor control module and monitoring module.
Datex—ohmeda Aestiva/5 7100型麻醉呼吸机的使用时间长了以后,出现潮气量误差大(超过±10%)的现象,引起潮气量过低报警,主要与麻醉呼吸机的压差型流量传感系统有关。
4) sensing system
传感系统
1.
Design of pressure-difference gas flow sensing system for vehicle;
一种压差式车用气体流量传感系统的设计
2.
The sensing system on foot in micro biped climbing robot is designed,ADuC842 is used to control and gather information from infrared sensor array,curvature fiber-optic sensor,air pressure sensor,accelerometer,and transmit the information to the main controller DSP via UART after processing.
吸盘的可靠吸附是爬壁机器人运动的基础,设计了机器人足部传感系统,用ADuC842单片机控制和采集了红外传感器阵列、光纤曲率传感器、气压传感器、加速度传感器的信息,经过处理后,通过UART发给机器人主控DSP,最终实现了吸盘的自适应对准和可靠吸附,并获取了机器人所吸附平面的倾斜度信息。
3.
Non-linear error and repeatability are two chief errors of sensing system, therefore, two software methods are proposed to decrease two errors in order to improve the accuracy of sensing system.
传感系统的2项主要误差是非线性误差和重复性,为了提高传感系统的准确度,提出了减小这2项误差的软件方法:即用神经网络技术减小非线性;用微机软件数字滤波技术减小重复性。
5) sensor system
传感系统
1.
Design of sensor system for a spherical mobile robot;
一种球形移动机器人传感系统设计
2.
This paper expounds the principle and design of an automatic controller on the basis of the software controlling technique and the sensor system of light detector, voice detector and infrared detector.
基于可见光探测、声响探测、热释红外探测三套传感系统和软件控制技术,阐述一种新型教室节能控制器的工作原理及设计方案。
3.
orks[1][2][3],this paper presents an optical fibre magnetic sensor system for measaring D.
在前人工作的基础上[1][2][3],本文提出一种可测直流场及低频场的光纤磁场传感系统,它具有Zhangucchi系统[1]的主要优点,但结构远较其简单。
6) multi-sensor visual measurement system
多视觉传感器测量系统
补充资料:长度测量工具:长度传感器
利用气动﹑电学﹑光学等原理和光电效应等将被测长度转换为空气的压力或流量﹑电量和光强等物理量﹐以获取测量信息的测量元件﹐用於某些长度测量工具中。长度传感器(以下简称传感器)主要由感受元件和转换元件组成。转换元件把感受元件感受的被测长度精确地转换为便於放大和处理的其他物理量。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器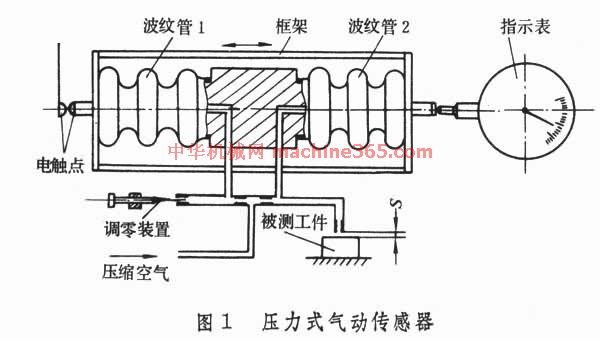 为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器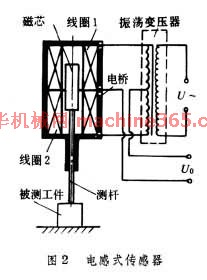 为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。 电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条