1) The faculty of sight; vision.

视觉;眼光
2) human vision
人眼视觉
1.
Image segmentation of agricultural products based on human vision;
基于人眼视觉的农产品图像分割方法
2.
Performance evaluation of optoelectronic imaging system is investigated in theory on the basis of human vision experiments.
根据人眼视觉实验 ,对光电成像系统的性能评价方法进行了理论研究 ,证明了光电成像系统与人眼之间存在最佳匹配状态 ,分析了视场角、成像系统性能以及系统角放大率对匹配的影响 ,定量描述电视型成像系统的最佳观察距离和直视型最佳目镜焦距的客观现象 ,所得结果与实际基本一
3.
The traditional method,which is based on MSE to objectively evaluate the quality of impressed images,sometimes cannot conform to effect of human vision perception.
为此提出一种建立在人眼视觉模型(HVS)基础之上的边缘均方误差评价方法,更能有效地反映出图像压缩失真在视觉上的感知。
3) binocular vision
双眼视觉
1.
Development of binocular vision three level function research in children;
儿童双眼视觉三级功能研究现状与进展
2.
Stress on the clinical study of functional abnormalities in binocular vision;
重视功能性双眼视觉异常的临床研究
3.
Occlusion therapy on binocular vision in amblyopia;
弱视遮盖治疗对双眼视觉的影响
4) eye-in-hand vision
手-眼视觉
1.
Research of dynamic object positioning method of eye-in-hand vision;
手-眼视觉动态目标定位方法研究
2.
A step dynamic object positioning method of robot eye-in-hand vision was proposed.
提出了一种机器人手-眼视觉分步动态目标定位方法。
5) monocular vision
单眼视觉
1.
By analyzing different representations of rigid body motions,we show how the Grassmannian structure is applied to monocular vision problems and simplifies th.
着重介绍了Grassmann分级表示如何被应用于单眼视觉问题并带来解决方法的简化;通过对刚体运动不同表示的分析,介绍旋量和扭量表示如何克服刚体运动蹬矩阵表示中参数空间具有过多非线性约束的缺点,从而为姿态估计、形状逼近和曲线拼接等问题的解决提供简化方案。
6) hand-eye vision
手眼视觉
1.
Primary design of hand-eye vision simulation system of space robots;
航天机器人手眼视觉模拟系统初步设计
2.
A semi-physical simulation system was constructed based on PCs, and the application software was developed using 3D graphic library OpenGL to simulate the free-flying work state of the robot and evaluate the efficiency of the actual hand-eye vision servo control algorithm of robot.
为了模拟机器人在自由运动的工作状态,验证实际物理手眼视觉伺服控制算法的效果,在4台PC机的基础上,用三维图形库OpenGL开发了仿真应用软件,组建了机器人视觉伺服控制半物理仿真系统。
3.
The hand-eye vision is used to provide the image information of object and measure the position and orientation of object, which is very important for the space robot to capture the objects.
手眼视觉用于提供目标物体的图像信息和测量物体的位置和姿态,对于空间机器人捕获物体非常重要。
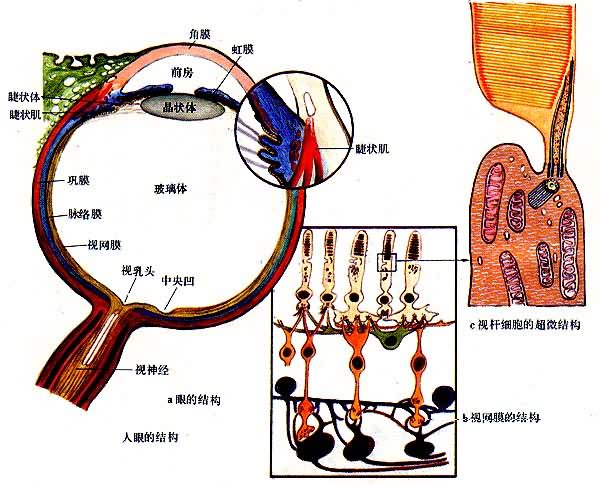
补充资料:视觉器官的进化人眼的结构
李瑞端绘
[图]
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条