1) 3D space coordinate

空间三维坐标
1.
The measurement principle of the dynamic input device for the 3D space coordinate and the system structure diagram are introduced.
介绍了空间三维坐标动态输入装置的测量原理及系统结构图,详细讨论了超声波发射、接收、比较整形电路和单片机接口电路的原理和特点。
2) 3-D space data coordinating
三维空间坐标
1.
Methods From 40 adult head specimens(male 20,female 20),34 points of each specimen were measured,3-D space data coordinatings were statistically analysed with SPSS10.
0对各测量点的三维空间坐标数值进行统计分析,计算其参考值范围,并对双侧和性别差异进行比较。
3) 3-D space data coordinates
三维空间数值坐标
4) nonlinear spatial three-dimensional rectangular coordinate
非线性空间三维直角坐标
6) 3D coordinates
三维坐标
1.
The accuracy analysis of point-point distance calculated by 3D coordinates;
由三维坐标值计算两点距离的精度分析及应用
2.
This paper states the principles of rapid obtaining the 3D coordinates of each point in an image based on the spectrometry.
阐述了基于光谱分析的快速获取图像中各点三维坐标的方法原理,主要讨论实现该方法的颜色分类技术,即将图像颜色按立体划分为亮度,色调,饱和度和标定技术,即确定空间颜色面的方
3.
The effect of the optical error of the cat’s eye retro-reflector on the laser tracking 3D coordinates measuring system and the main sources of the optical error of the cat’s eye retro-reflector are introduced.
介绍了猫眼光学误差对激光跟踪三维坐标测量系统的影响及猫眼光学误差的主要来源,设计了一种猫眼光学误差的测量原理并构建了相应的测量装置,论述了测量数据处理方法以及在进行激光跟踪三维坐标测量时对猫眼光学误差进行修正的方法。
补充资料:像空间辅助坐标系
像空间辅助坐标系
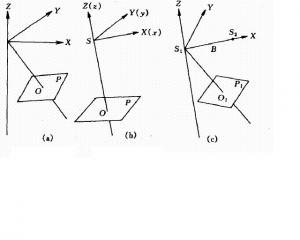
此坐标系的原点仍选在摄影中心s,坐标轴系的选择视需要而定,通常有三种选取方法。其一是取铅垂方向为z轴,航向为x轴,构成右手直角坐标系,见图(a)。其二是以每条航线内第一张像片的像空间坐标系作为像空间辅助坐标系,见图(b)。其三是以每个像片对的左片摄影中心为坐标原点,摄影基线方向为x轴,以摄影基线及左片主光轴构成的面作为xz平面,构成右手直角坐标系,如图(c)。用s-xyz表示。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。