2) parallel indexing cam mechanism

平行分度凸轮机构
1.
The speed-ratio curve of double-action parallel indexing cam mechanism has special property in shape,which makes it is not available from present transmission function,but designed purposely.
双作用式平行分度凸轮机构对速比曲线的几何形态有特殊要求,这使得该机构的速比不能从同类机构现有运动规律中得到,而必须经过特殊设计。
2.
For double-action parallel indexing cam mechanism,the characteristics of its instantaneous center curve are determined by the mechanism’s speed-ratio.
双作用式平行分度凸轮机构的速比特点,决定其瞬心线的几何特性。
3.
This paper proposes double action parallel indexing cam mechanism,and studies cams profile by methods used in gear meshing.
提出了双作用式平行分度凸轮机构,并按研究齿轮啮合的方法研究其凸轮廓线。
3) planet globoidal cams reducer mechanisms
行星弧面凸轮减速机构
1.
The characteristic of planet globoidal cams reducer mechanisms was analyzed and studied from the angles of geometry and kinematics.
从几何学与运动学角度对行星弧面凸轮减速机构进行了分析与研究,根据空间机构的共轭啮合原理,采用齐次坐标变换推导了减速机构内弧面凸轮的轮廓曲面方程和压力角方程,并对机构的基本尺寸或参数选取进行了探讨,发现在满足滚子抗弯强度的前提下,采用具有较多滚子的从动盘有助于降低传动压力角和提高传动效率。
4) indexing cam mechanism
分度凸轮机构
1.
New type of envelope worm indexing cam mechanism with rolling teeth;
具有滚动齿的新型包络蜗杆分度凸轮机构
2.
Cam contour line design of a kind of new typed planetary indexing cam mechanism possessing large indexing number;
一种具有大分度数新型行星分度凸轮机构凸轮廓线设计
3.
Cam mechanisms,especially indexing cam mechanisms,play an important role in modern mechanical engineering.
凸轮机构特别是分度凸轮机构在现代工业生产中发挥了重要作用。
5) cam indexing driven
凸轮分度机构
6) indexing cam mechanisms
分度凸轮机构
1.
We establish two kinds of engagement surface equation for indexing cam mechanisms, and make the mechanism model motion by OpenGL technique to make complicate cam mechanism motion visualization and simulate real running status of indexing cam mechanisms.
为了将复杂的凸轮机构可视化 ,实时地模拟分度凸轮机构的真实运动状态 ,建立了分度凸轮机构的轮廓曲面方程 ,运用 Open GL 技术 ,对其进行运动仿真。
2.
The conception of the envelope worm indexing cam mechanisms is proposed for the first time, through introducing worm gear drive techniques to indexing cam mechanisms.
将成熟的蜗轮蜗杆传动技术引入到分度凸轮机构研究领域,提出包络蜗杆分度凸轮机构的新构思,并就该机构的传动原理、结构特征及技术特点作了简要的论述,为样机制造奠定了基础。
3.
We establish two kinds of engagement surface equations for indexing cam mechanisms,and make the mecha- nism model motion by Open GL technique to make complicate mechanism motion visualization and simulate real running status of indexing cam mechanisms.
为了将复杂的凸轮机构可视化,实时地模拟分度凸轮机构的真实运动状态,建立了分度凸轮机构的轮廓曲面方程, 运用 OpenGL 技术,对其进行运动仿真。
补充资料:机械原理:凸轮机构
由凸轮的迴转运动或往復运动推动从动件作规定往復移动或摆动的机构。凸轮具有曲线轮廓或凹槽﹐有盘形凸轮﹑圆柱凸轮(图1 两种典型凸轮机构 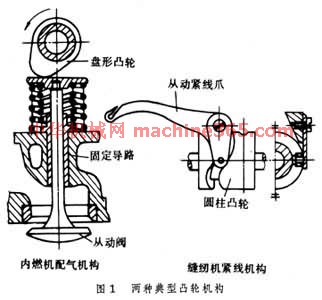 )和移动凸轮等﹐其中圆柱凸轮的凹槽曲线是空间曲线﹐因而属於空间凸轮。从动件与凸轮作点接触或线接触﹐有滚子从动件﹑平底从动件和尖端从动件等。尖端从动件能与任意复杂的凸轮轮廓保持接触﹐可实现任意运动﹐但尖端容易磨损﹐适用於传力较小的低速机构中。为了使从动件与凸轮始终保持接触﹐可採用弹簧或施加重力。具有凹槽的凸轮可使从动件传递确定的运动﹐为确动凸轮的一种。一般情况下凸轮是主动的﹐但也有从动或固定的凸轮。多数凸轮是单自由度的﹐但也有双自由度的劈锥凸轮。凸轮机构结构紧凑﹐最适用於要求从动件作间歇运动的场合。它与液压和气动的类似机构比较﹐运动可靠﹐因此在自动机床﹑内燃机﹑印刷机和纺织机中得到广泛应用。但凸轮机构易磨损﹐有噪声﹐高速凸轮的设计比较复杂﹐製造要求较高。
)和移动凸轮等﹐其中圆柱凸轮的凹槽曲线是空间曲线﹐因而属於空间凸轮。从动件与凸轮作点接触或线接触﹐有滚子从动件﹑平底从动件和尖端从动件等。尖端从动件能与任意复杂的凸轮轮廓保持接触﹐可实现任意运动﹐但尖端容易磨损﹐适用於传力较小的低速机构中。为了使从动件与凸轮始终保持接触﹐可採用弹簧或施加重力。具有凹槽的凸轮可使从动件传递确定的运动﹐为确动凸轮的一种。一般情况下凸轮是主动的﹐但也有从动或固定的凸轮。多数凸轮是单自由度的﹐但也有双自由度的劈锥凸轮。凸轮机构结构紧凑﹐最适用於要求从动件作间歇运动的场合。它与液压和气动的类似机构比较﹐运动可靠﹐因此在自动机床﹑内燃机﹑印刷机和纺织机中得到广泛应用。但凸轮机构易磨损﹐有噪声﹐高速凸轮的设计比较复杂﹐製造要求较高。
从动件运动规律 在带滚子的对心直动从动件盘形凸轮机构(图2 凸轮廓线设计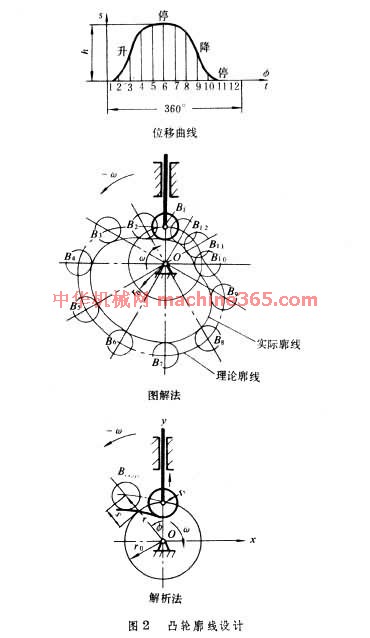 )中﹐凸轮迴转一周从动件依次作昇-停-降-停4个动作。从动件位移(或行程高度)与凸轮转角(或时间)的关係称为位移曲线。从动件的行程有推程和迴程。凸轮轮廓曲线决定於位移曲线的形状。在某些机械中﹐位移曲线由工艺过程决定﹐但一般情况下只有行程和对应的凸轮转角根据工作需要决定﹐而曲线的形状则由设计者选定﹐可以有多种运动规律。传统的凸轮运动规律有等速﹑等加速-等减速﹑餘弦加速度和正弦加速度等。等速运动规律因有速度突变﹐会產生强烈的刚性衝击﹐只适用於低速。等加速-等减速和餘弦加速度也有加速度突变﹐会引起柔性衝击﹐只适用於中﹑低速。正弦加速度运动规律的加速度曲线是连续的﹐没有任何衝击﹐可用於高速。
)中﹐凸轮迴转一周从动件依次作昇-停-降-停4个动作。从动件位移(或行程高度)与凸轮转角(或时间)的关係称为位移曲线。从动件的行程有推程和迴程。凸轮轮廓曲线决定於位移曲线的形状。在某些机械中﹐位移曲线由工艺过程决定﹐但一般情况下只有行程和对应的凸轮转角根据工作需要决定﹐而曲线的形状则由设计者选定﹐可以有多种运动规律。传统的凸轮运动规律有等速﹑等加速-等减速﹑餘弦加速度和正弦加速度等。等速运动规律因有速度突变﹐会產生强烈的刚性衝击﹐只适用於低速。等加速-等减速和餘弦加速度也有加速度突变﹐会引起柔性衝击﹐只适用於中﹑低速。正弦加速度运动规律的加速度曲线是连续的﹐没有任何衝击﹐可用於高速。
为使凸轮机构运动的加速度及其速度变化率都不太大﹐同时考虑动量﹑振动﹑凸轮尺寸﹑弹簧尺寸和工艺要求等问题﹐还可设计出其他各种运动规律。应用较多的有用几段曲线组合而成的运动规律﹐诸如变形正弦加速度﹑变形梯形加速度和变形等速的运动规律等﹐利用电子计算机也可以随意组合成各种运动规律。还可以採用多项式表示的运动规律﹐以获得一连续的加速度曲线。为了获得最满意的加速度曲线﹐还可以任意用数值形式给出一条加速度曲线﹐然后用有限差分法求出位移曲线﹐最后设计出凸轮廓线。
)和移动凸轮等﹐其中圆柱凸轮的凹槽曲线是空间曲线﹐因而属於空间凸轮。从动件与凸轮作点接触或线接触﹐有滚子从动件﹑平底从动件和尖端从动件等。尖端从动件能与任意复杂的凸轮轮廓保持接触﹐可实现任意运动﹐但尖端容易磨损﹐适用於传力较小的低速机构中。为了使从动件与凸轮始终保持接触﹐可採用弹簧或施加重力。具有凹槽的凸轮可使从动件传递确定的运动﹐为确动凸轮的一种。一般情况下凸轮是主动的﹐但也有从动或固定的凸轮。多数凸轮是单自由度的﹐但也有双自由度的劈锥凸轮。凸轮机构结构紧凑﹐最适用於要求从动件作间歇运动的场合。它与液压和气动的类似机构比较﹐运动可靠﹐因此在自动机床﹑内燃机﹑印刷机和纺织机中得到广泛应用。但凸轮机构易磨损﹐有噪声﹐高速凸轮的设计比较复杂﹐製造要求较高。 从动件运动规律 在带滚子的对心直动从动件盘形凸轮机构(图2 凸轮廓线设计
)中﹐凸轮迴转一周从动件依次作昇-停-降-停4个动作。从动件位移(或行程高度)与凸轮转角(或时间)的关係称为位移曲线。从动件的行程有推程和迴程。凸轮轮廓曲线决定於位移曲线的形状。在某些机械中﹐位移曲线由工艺过程决定﹐但一般情况下只有行程和对应的凸轮转角根据工作需要决定﹐而曲线的形状则由设计者选定﹐可以有多种运动规律。传统的凸轮运动规律有等速﹑等加速-等减速﹑餘弦加速度和正弦加速度等。等速运动规律因有速度突变﹐会產生强烈的刚性衝击﹐只适用於低速。等加速-等减速和餘弦加速度也有加速度突变﹐会引起柔性衝击﹐只适用於中﹑低速。正弦加速度运动规律的加速度曲线是连续的﹐没有任何衝击﹐可用於高速。 为使凸轮机构运动的加速度及其速度变化率都不太大﹐同时考虑动量﹑振动﹑凸轮尺寸﹑弹簧尺寸和工艺要求等问题﹐还可设计出其他各种运动规律。应用较多的有用几段曲线组合而成的运动规律﹐诸如变形正弦加速度﹑变形梯形加速度和变形等速的运动规律等﹐利用电子计算机也可以随意组合成各种运动规律。还可以採用多项式表示的运动规律﹐以获得一连续的加速度曲线。为了获得最满意的加速度曲线﹐还可以任意用数值形式给出一条加速度曲线﹐然后用有限差分法求出位移曲线﹐最后设计出凸轮廓线。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条