1) Laser microshot measurement

激光微距测量
2) laser range
激光测距
1.
Study on laser range finders of pulse-phase type;
脉冲-相位式激光测距仪的研究
2.
The method of time-to-amplitude conversion and its application in laser range finding system;
时幅转换技术及其在激光测距系统中的应用
3.
This instrument utilizes laser range finder,rotating grating encoder and other auxiliary tools to measure the geometry parameters, calculate and display the re-sults on LCD,then,transmit the data to PDA by Blueteeth module,for summarizing , saving, exporting reports.
介绍了电气化铁路接触网导高、拉出值等几何参数的意义和测量原理,提出了一种基于嵌入式系统的接触网多参数测量仪的设计方案,采用激光测距仪、旋转光栅编码器及辅助器材测量各几何参数,在液晶屏上显示计算结果。
3) laser range finder
激光测距
1.
Implementation of data processing module of phase-laser range finder based on FPGA;
基于FPGA实现相位激光测距法中数据处理
2.
The Design of Laser Range Finder Full Digital Signal Processing System Based on FPGA;
基于FPGA的全数字激光测距信号处理系统的设计
3.
Phase-shift laser range finder receiver system
相位法激光测距接收系统
4) laser range finding
激光测距
1.
High speed acquisition and processing circuit for digital laser range finding;
激光测距的高速采集与处理电路的设计
2.
Study of CCD laser range finding based on static image;
基于静态图像的CCD激光测距方法的研究
5) Laser rangefinder
激光测距
1.
Range estimation in phase shift laser rangefinder with non cooperative target;
非合作目标相位式激光测距系统的测程估计
2.
Model of the received power in non cooperative target phase shift laser rangefinder;
非合作目标相位式激光测距接收光功率的模型建立
3.
Crosstalk in intensity modulated continuous wave laser rangefinder;
调强连续波激光测距系统中的电子交调干扰
6) laser ranging
激光测距
1.
The influence of the coefficient of atmospheric attenuation to the capability of laser ranging;
大气衰减系数对激光测距能力影响的研究
2.
The 3-dimension measuring system based on the laser ranging;
基于激光测距的三坐标测量系统研究
3.
Time interval measurement of laser ranging based on CPLD & microchip;
基于CPLD和单片机的激光测距时间间隔测量
补充资料:长度测量工具:激光干涉仪
以激光波长为已知长度﹑利用迈克耳逊干涉系统(见激光测长技术)测量位移的通用长度测量工具。激光干涉仪有单频的和双频的两种。单频的是在20世纪60年代中期出现的﹐最初用於检定基準线纹尺﹐后又用於在计量室中精密测长。双频激光干涉仪是1970年出现的﹐它适宜在车间中使用。激光干涉仪在极接近标準状态(温度为20℃﹑大气压力为101325帕﹑相对湿度59%﹑C O2 含量0.03%)下的测量精确度很高﹐可达1×10-7。
单频激光干涉仪 图1 单频激光干涉仪的工作原理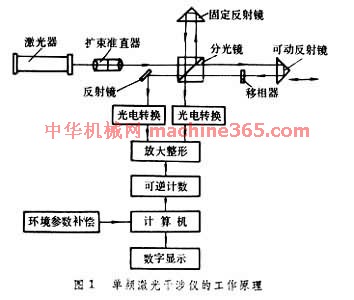 为单频激光干涉仪的工作原理。从激光器发出的光束﹐经扩束準直后由分光镜分为两路﹐并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而產生干涉条纹。当可动反射镜移动时﹐干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉衝信号﹐经整形﹑放大后输入可逆计数器计算出总脉衝数﹐再由电子计算机按计算式
为单频激光干涉仪的工作原理。从激光器发出的光束﹐经扩束準直后由分光镜分为两路﹐并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而產生干涉条纹。当可动反射镜移动时﹐干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉衝信号﹐经整形﹑放大后输入可逆计数器计算出总脉衝数﹐再由电子计算机按计算式 式中
式中 为激光波长(N 为电脉衝总数)﹐算出可动反射镜的位移量L 。使用单频激光干涉仪时﹐要求周围大气处於稳定状态﹐各种空气湍流都会引起直流电平变化而影响测量结果。
为激光波长(N 为电脉衝总数)﹐算出可动反射镜的位移量L 。使用单频激光干涉仪时﹐要求周围大气处於稳定状态﹐各种空气湍流都会引起直流电平变化而影响测量结果。
双频激光干涉仪 图2 双频激光干涉仪的工作原理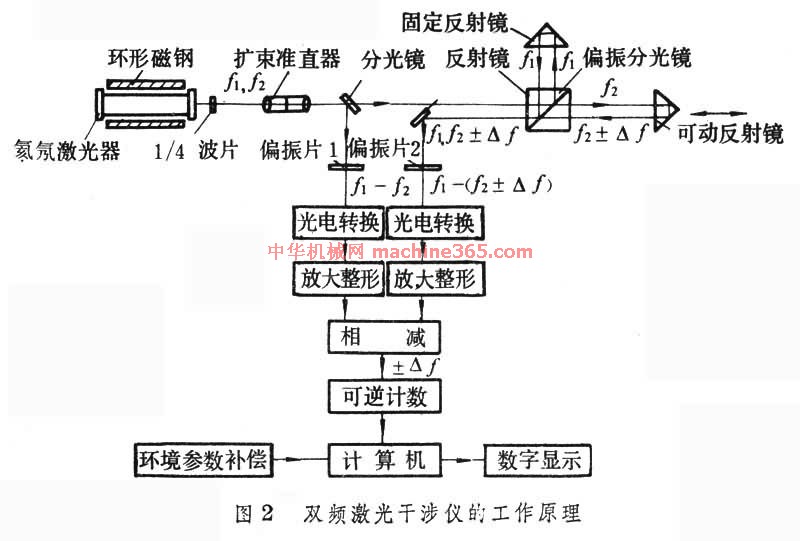 为双频激光干涉仪的工作原理。在氦氖激光器上﹐加上一个约0.03特斯拉的轴向磁场。由於塞曼分裂效应和频率牵引效应﹐激光器產生f 1和f 2两个不同频率的左旋和右旋圆偏振光。经1/4波片后成为两个互相垂直的线偏振光﹐再经分光镜分为两路。一路经偏振片1后成为含有频率为f 1- f 2的参考光束。另一路经偏振分光镜后又分为两路﹕一路成为仅含有f 1的光束﹐另一路成为仅含有f 2的光束。当可动反射镜移动时﹐含有f 2的光束经可动反射镜反射后成为含有f 2 ±Δf 的光束﹐Δf 是可动反射镜移动时因多普勒效应產生的附加频率﹐正负号表示移动方向(多普勒效应是奥地利人C.J.多普勒提出的﹐即波的频率在波源或接受器运动时会產生变化)。这路光束和由固定反射镜反射回来仅含有f 1的光的光束经偏振片 f 2后会合成为f 1-(f2±Δf )的测量光束。测量光束和上述参考光束经各自的光电转换元件﹑放大器﹑整形器后进入减法器相减﹐输出成为仅含有±Δf 的电脉衝信号。经可逆计数器计数后﹐由电子计算机进行当量换算(乘 1/2激光波长)后即可得出可动反射镜的位移量。双频激光干涉仪是应用频率变化来测量位移的﹐这种位移信息载於f 1和f 2的频差上﹐对由光强变化引起的直流电平变化不敏感﹐所以抗干扰能力强。它常用於检定测长机﹑三坐标测量机﹑光刻机和加工中心等的坐标精度﹐也可用作测长机﹑高精度三坐标测量机等的测量系统。利用相应附件﹐还可进行高精度直线度测量﹑平面度测量和小角度测量。(见彩图 双频激光干涉仪 )
为双频激光干涉仪的工作原理。在氦氖激光器上﹐加上一个约0.03特斯拉的轴向磁场。由於塞曼分裂效应和频率牵引效应﹐激光器產生f 1和f 2两个不同频率的左旋和右旋圆偏振光。经1/4波片后成为两个互相垂直的线偏振光﹐再经分光镜分为两路。一路经偏振片1后成为含有频率为f 1- f 2的参考光束。另一路经偏振分光镜后又分为两路﹕一路成为仅含有f 1的光束﹐另一路成为仅含有f 2的光束。当可动反射镜移动时﹐含有f 2的光束经可动反射镜反射后成为含有f 2 ±Δf 的光束﹐Δf 是可动反射镜移动时因多普勒效应產生的附加频率﹐正负号表示移动方向(多普勒效应是奥地利人C.J.多普勒提出的﹐即波的频率在波源或接受器运动时会產生变化)。这路光束和由固定反射镜反射回来仅含有f 1的光的光束经偏振片 f 2后会合成为f 1-(f2±Δf )的测量光束。测量光束和上述参考光束经各自的光电转换元件﹑放大器﹑整形器后进入减法器相减﹐输出成为仅含有±Δf 的电脉衝信号。经可逆计数器计数后﹐由电子计算机进行当量换算(乘 1/2激光波长)后即可得出可动反射镜的位移量。双频激光干涉仪是应用频率变化来测量位移的﹐这种位移信息载於f 1和f 2的频差上﹐对由光强变化引起的直流电平变化不敏感﹐所以抗干扰能力强。它常用於检定测长机﹑三坐标测量机﹑光刻机和加工中心等的坐标精度﹐也可用作测长机﹑高精度三坐标测量机等的测量系统。利用相应附件﹐还可进行高精度直线度测量﹑平面度测量和小角度测量。(见彩图 双频激光干涉仪 ) 
单频激光干涉仪 图1 单频激光干涉仪的工作原理
为单频激光干涉仪的工作原理。从激光器发出的光束﹐经扩束準直后由分光镜分为两路﹐并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而產生干涉条纹。当可动反射镜移动时﹐干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉衝信号﹐经整形﹑放大后输入可逆计数器计算出总脉衝数﹐再由电子计算机按计算式式中为激光波长(N 为电脉衝总数)﹐算出可动反射镜的位移量L 。使用单频激光干涉仪时﹐要求周围大气处於稳定状态﹐各种空气湍流都会引起直流电平变化而影响测量结果。 双频激光干涉仪 图2 双频激光干涉仪的工作原理
为双频激光干涉仪的工作原理。在氦氖激光器上﹐加上一个约0.03特斯拉的轴向磁场。由於塞曼分裂效应和频率牵引效应﹐激光器產生f 1和f 2两个不同频率的左旋和右旋圆偏振光。经1/4波片后成为两个互相垂直的线偏振光﹐再经分光镜分为两路。一路经偏振片1后成为含有频率为f 1- f 2的参考光束。另一路经偏振分光镜后又分为两路﹕一路成为仅含有f 1的光束﹐另一路成为仅含有f 2的光束。当可动反射镜移动时﹐含有f 2的光束经可动反射镜反射后成为含有f 2 ±Δf 的光束﹐Δf 是可动反射镜移动时因多普勒效应產生的附加频率﹐正负号表示移动方向(多普勒效应是奥地利人C.J.多普勒提出的﹐即波的频率在波源或接受器运动时会產生变化)。这路光束和由固定反射镜反射回来仅含有f 1的光的光束经偏振片 f 2后会合成为f 1-(f2±Δf )的测量光束。测量光束和上述参考光束经各自的光电转换元件﹑放大器﹑整形器后进入减法器相减﹐输出成为仅含有±Δf 的电脉衝信号。经可逆计数器计数后﹐由电子计算机进行当量换算(乘 1/2激光波长)后即可得出可动反射镜的位移量。双频激光干涉仪是应用频率变化来测量位移的﹐这种位移信息载於f 1和f 2的频差上﹐对由光强变化引起的直流电平变化不敏感﹐所以抗干扰能力强。它常用於检定测长机﹑三坐标测量机﹑光刻机和加工中心等的坐标精度﹐也可用作测长机﹑高精度三坐标测量机等的测量系统。利用相应附件﹐还可进行高精度直线度测量﹑平面度测量和小角度测量。(见彩图 双频激光干涉仪 ) 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条