1) initial mechanical momentum operator

初始机械动量算符
1.
The center coordinates and initial mechanical momentum operators are taken as the complete set of observables, the non-stationary state wavefunction for a charged particle in a uniform magnetic field is obtained.
取圆心坐标算符和初始机械动量算符为力学量完全集,给出均匀磁场中带电粒子的非定态波函数。
2) initial momentum operator
初动量算符
1.
In this paper the initial coordinate operator and the initial momentum operator are taken separately as the complete set of dynamical variables for a two dimensional oscillator and the corresponding non stationary state wavefunctions of the two dimensional oscillator are derived.
引入了初坐标算符和初动量算符为二维谐振子的力学量完全集来求解薛定谔方程 ,得到了二维谐振子的 4类非定态波函
3) initial mechanical momentum
初机械动量
1.
Common eigenstates of square of center redius vector operator and initial mechanical momentum operator of a charged particle in a uniform magnetic field are obtained.
给出Landau体系(带电粒子在垂直于均匀磁场的平面内的运动)的圆心位矢平方算符和初机械动量算符的共同本征态,圆心位矢平方取量子化分立
4) initiative motivation
初始动机
1.
This paper tells us how to realize win-win strategies between the corporation and the consulting company by analyzing the initiative motivation of the corporations,their relationship and the clients behavior of the consulting company.
针对企业客观上存在着对管理咨询服务的强烈需求,而企业反馈却显示咨询公司提供的解决方案在企业运营中所起作用有限的状况,通过分析企业利用管理咨询服务的初始动机,解读人们对企业和管理咨询公司双方关系的认识误区与管理咨询公司的客户关系行为特点,探讨如何实现企业与咨询公司之间的默契配合与互利共赢。
5) initial angular momentum
初始角动量
6) momentum operator
动量算符
1.
Discussion on a relativity momentum operator;
一个相对论性动量算符公式的再讨论
2.
This article discusses in detail about the presentation of the momentum operator P under coordinate representation.
对坐标表象中动量算符声的具体表示进行了讨论。
3.
It is proved that the components of relativitic momentum operator in any coordinate,in-cluding the curve coordinate,is compoment operator of momentum,and it is impossible that there exist the term relative to spin matrix.
指出相对论性动量算符p^在任何坐标系中的分量 ,包括在曲线坐标系中的分量也是动量分量的算符 ,不可能出现与自旋矩阵有关的项 。
补充资料:机械零件:液体动压轴承
液体动压轴承
靠液体润滑剂动压力形成的液膜隔开两摩擦表面并承受载荷的滑动轴承。液体润滑剂是被两摩擦面的相对运动带入两摩擦面之间的。產生液体动压力的条件是﹕两摩擦面有足够的相对运动速度﹔润滑剂有适当的黏度﹔两表面间的间隙是收敛的(这一间隙实际很小﹐在图1 油楔承载 中是夸大画的)﹐在相对运动中润滑剂从间隙的大口流向小口﹐构成油楔。这种支承载荷的现象通常称为油楔承载(见润滑)。
油楔承载 中是夸大画的)﹐在相对运动中润滑剂从间隙的大口流向小口﹐构成油楔。这种支承载荷的现象通常称为油楔承载(见润滑)。
机械加工后的两摩擦表面微观是凹凸不平的﹐如图1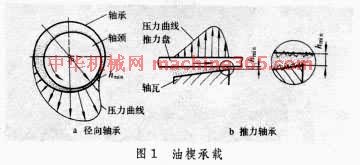 油楔承载 中局部放大图。在正常运输的液体动压轴承中﹐油膜最薄(即通称最小油膜厚度)处两表面的微观凸峰不接触﹐因而两表面没有磨损。这时的摩擦完全属於油的内摩擦﹐摩擦係数可小至0.001。油的黏度越低﹐摩擦係数越小﹐但最小油膜厚度也越薄。因此﹐油的最低黏度受到最小油膜厚度的限制。当最小油膜厚度处两表面的微观凸峰接触时﹐油膜破裂﹐摩擦和磨损都增大。摩擦功使油发热而降低油的黏度。为使油的黏度比较稳定﹐一般採用有冷却装置的循环供油系统或在油中加入能降低油对温度敏感的添加剂(见润滑剂)。液体动压轴承在啟动和停车过程中﹐因速度低不能形成足够隔开两摩擦表面的油膜﹐容易出现磨损﹐所以製造轴瓦或轴承衬须选用能在直接接触条件下工作的滑动轴承材料。液体动压轴承要求轴颈和轴瓦表面几何形状正确而且光滑﹐安装时精确对中。
油楔承载 中局部放大图。在正常运输的液体动压轴承中﹐油膜最薄(即通称最小油膜厚度)处两表面的微观凸峰不接触﹐因而两表面没有磨损。这时的摩擦完全属於油的内摩擦﹐摩擦係数可小至0.001。油的黏度越低﹐摩擦係数越小﹐但最小油膜厚度也越薄。因此﹐油的最低黏度受到最小油膜厚度的限制。当最小油膜厚度处两表面的微观凸峰接触时﹐油膜破裂﹐摩擦和磨损都增大。摩擦功使油发热而降低油的黏度。为使油的黏度比较稳定﹐一般採用有冷却装置的循环供油系统或在油中加入能降低油对温度敏感的添加剂(见润滑剂)。液体动压轴承在啟动和停车过程中﹐因速度低不能形成足够隔开两摩擦表面的油膜﹐容易出现磨损﹐所以製造轴瓦或轴承衬须选用能在直接接触条件下工作的滑动轴承材料。液体动压轴承要求轴颈和轴瓦表面几何形状正确而且光滑﹐安装时精确对中。
液体动压轴承分液体动压径向轴承和液体动压推力轴承。液体动压径向轴承又分单油楔和多油楔两类(见表 液体动压径向轴承类型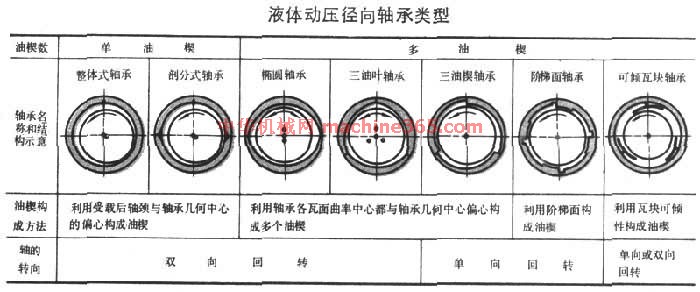 )。
)。
单油楔液体动压径向轴承 轴颈周围只有一个承载油楔的轴承。图2 单油楔轴承的几何参数 中是剖分式的单油楔轴承。O 为轴承几何中心﹐O 为承受载荷F 后的轴颈中心。这两中心的连线称为连心线。连心线与载荷作用线所夹锐角称为偏位角。受载瓦面包围轴颈的角度称为轴承包角。O 与O 之间的距离称为偏心距。轴承孔半径R 与轴颈半径之差称为半径间隙。与之比称为相对间隙。与之比称为偏心率。最小油膜厚度=-=(1-)﹐所在方位由确定。轴承宽度B (轴向尺寸)与轴承直径之比称为宽径比。
单油楔轴承的几何参数 中是剖分式的单油楔轴承。O 为轴承几何中心﹐O 为承受载荷F 后的轴颈中心。这两中心的连线称为连心线。连心线与载荷作用线所夹锐角称为偏位角。受载瓦面包围轴颈的角度称为轴承包角。O 与O 之间的距离称为偏心距。轴承孔半径R 与轴颈半径之差称为半径间隙。与之比称为相对间隙。与之比称为偏心率。最小油膜厚度=-=(1-)﹐所在方位由确定。轴承宽度B (轴向尺寸)与轴承直径之比称为宽径比。
靠液体润滑剂动压力形成的液膜隔开两摩擦表面并承受载荷的滑动轴承。液体润滑剂是被两摩擦面的相对运动带入两摩擦面之间的。產生液体动压力的条件是﹕两摩擦面有足够的相对运动速度﹔润滑剂有适当的黏度﹔两表面间的间隙是收敛的(这一间隙实际很小﹐在图1
油楔承载 中是夸大画的)﹐在相对运动中润滑剂从间隙的大口流向小口﹐构成油楔。这种支承载荷的现象通常称为油楔承载(见润滑)。 机械加工后的两摩擦表面微观是凹凸不平的﹐如图1
油楔承载 中局部放大图。在正常运输的液体动压轴承中﹐油膜最薄(即通称最小油膜厚度)处两表面的微观凸峰不接触﹐因而两表面没有磨损。这时的摩擦完全属於油的内摩擦﹐摩擦係数可小至0.001。油的黏度越低﹐摩擦係数越小﹐但最小油膜厚度也越薄。因此﹐油的最低黏度受到最小油膜厚度的限制。当最小油膜厚度处两表面的微观凸峰接触时﹐油膜破裂﹐摩擦和磨损都增大。摩擦功使油发热而降低油的黏度。为使油的黏度比较稳定﹐一般採用有冷却装置的循环供油系统或在油中加入能降低油对温度敏感的添加剂(见润滑剂)。液体动压轴承在啟动和停车过程中﹐因速度低不能形成足够隔开两摩擦表面的油膜﹐容易出现磨损﹐所以製造轴瓦或轴承衬须选用能在直接接触条件下工作的滑动轴承材料。液体动压轴承要求轴颈和轴瓦表面几何形状正确而且光滑﹐安装时精确对中。 液体动压轴承分液体动压径向轴承和液体动压推力轴承。液体动压径向轴承又分单油楔和多油楔两类(见表 液体动压径向轴承类型
)。 单油楔液体动压径向轴承 轴颈周围只有一个承载油楔的轴承。图2
单油楔轴承的几何参数 中是剖分式的单油楔轴承。O 为轴承几何中心﹐O 为承受载荷F 后的轴颈中心。这两中心的连线称为连心线。连心线与载荷作用线所夹锐角称为偏位角。受载瓦面包围轴颈的角度称为轴承包角。O 与O 之间的距离称为偏心距。轴承孔半径R 与轴颈半径之差称为半径间隙。与之比称为相对间隙。与之比称为偏心率。最小油膜厚度=-=(1-)﹐所在方位由确定。轴承宽度B (轴向尺寸)与轴承直径之比称为宽径比。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条