1) Position points

定位部位
2) tail positioning
尾部定位
1.
Control thought and algorithm for logic control and tension control,automatic position control (APC),coil diameter calculation,and tail positioning are described in detail.
结合川威950热轧工程卷取区的控制,介绍卷取设备、工艺、自动控制系统组成,详细阐述卷取逻辑控制和张力控制、APC、卷径计算、尾部定位等控制算法及思想。
2.
Control thought and algorithm for track control and tension control,coil diameter calculation,and tail positioning are described in detail.
其各种控制的算法及其思想将直接关系到产品的精度和生产的正常进行,由此,介绍了卷取区设备的组成及其设备的主要功能,概括卷取的工艺流程和卷取自动控制系统的组成,详细阐述卷取跟踪控制,卷取机芯轴张力控制,卷取过程中卷径计算,尾部定位控制的算法及其思想。
3) Fixation sites
固定部位
5) local location
局部定位
1.
Fuzzy logic based motion control approach was proposed, using sensor fusion for robot local location, aimed at the requirement of stability and safety for articulated mobile robot moving on slope.
本文针对关节式移动机器人在斜面上运动时稳定性和安全性的要求对其进行动力学分析 ,利用传感器融合技术对机器人进行局部定位 ,提出了它的基于模糊逻辑的控制策略 。
6) coloning site
定殖部位
1.
The pathways for strain B47 to enter tomato plant and its coloning site in tomato organ were studied.
本研究对该菌株入侵番茄的途径及其定殖部位进行检测。
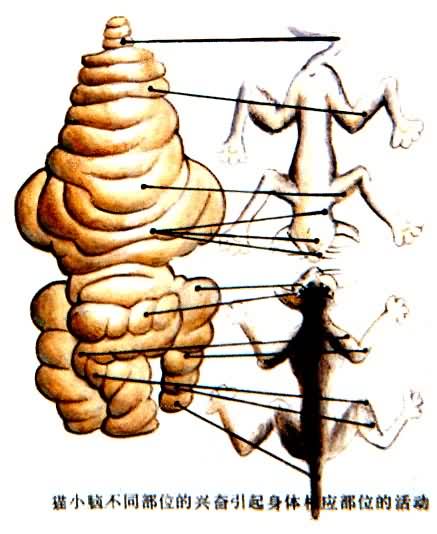
补充资料:人脑的功能分化猫小脑不同部位的兴奋引起身体相应部位的活动
李瑞端绘
[图]
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条