1) multi-sensor measurement fusion

多传感器测量融合
2) multisensor measurement fusion
多传感器量测融合
1.
Currently there exist three multisensor measurement fusion methods, namely, augmented method, pseudo-sequential filtering method, and combined measurement filtering method.
归纳三类多传感器量测融合算法,即扩维滤波法、伪序贯滤波法和复合量测滤波法。
4) multi-sensor fusion
多传感器融合
1.
A multi-sensor fusion and control system was designed,with a dual-CPU structure based on ADμC812 and TMS320F206.
设计了基于ADμC812和TMS320F206的双CPU结构的多传感器融合与控制系统,介绍了该系统的体系机构、硬件配置、接口电路、工作原理和工作流程,实现了传感器信息融合的高速高精度采集、复杂算法的大数据量实时计算以及模拟与开关量并有的多控制通道等功能。
2.
Based on analyzing the factors mainly affect the accuracy of the measurement, microwave technique and capacitance technology which combined with the specific resistivity of fly ash is adopted to construct a multi-sensor fusion-based measuring system, and then BP neural network is utilized to fuse the multi-s.
但在实际应用中灰种变化对仪器的测量精度有严重影响,该文针对火电厂飞灰含碳量的测量受灰种影响较大这一技术问题,分析了影响微波飞灰含碳量测量精度的因素,采用微波技术、电容技术,结合飞灰比电阻特性构造了多传感器融合的测量系统,利用BP神经网络对多传感器信息进行有效融合。
3.
The basic principles of multi-sensor fusion,architecture and function model of data fusion,data fusion meth- ods,and the scope of applications are introduced,the applications of data fusion in the radar networks system are intro- duced.
多传感器数据融合技术是近几年发展起来的一门新兴技术,在军事和工业中有着广阔的应用前景,文中论述了多传感器融合的基本工作原理、数据融合结构和功能模型、数据融合方法和应用领域,简单介绍了多传感器数据融合在组网雷达系统中的应用,总结了当前数据融合研究中存在的问题和研究方向。
5) multi-sensor data fusion
多传感器融合
1.
Based on the multi-sensor data fusion technique and D-S theory,the method to control and monitor welding quality was designed and experiment system was established.
利用多传感器融合技术与D-S证据与决策理论,设计了焊接质量信号的获取与控制方案,建立了试验系统。
2.
For dealing with aerial target recognition data with uncertainty and fuzzyness,and improving the precision and reliability of multi-sensor fusion for aerial target,a multi-sensor data fusion model was put forward based on fuzzy Bayesian network structure.
为了对充满不确定性与模糊性的空中目标识别数据进行处理,提高空中目标多传感器融合的准确性和可靠性,提出以模糊贝叶斯网络为基本结构的多传感器数据融合模型。
3.
Aiming at the problem of detection performance of infrared(IR) images,from the typical flow of multi-sensor data fusion algorithm,the relationship among the detection performances of single IR image,IR image sequence,and multi-sensor data fusion algorithm was deduced.
针对红外图像目标检测性能问题,从多传感器融合算法的典型流程出发,推导单帧检测性能、多帧检测性能和多传感器融合性能的关系,并从理论上对单个因素的影响进行定量分析。
6) multisensor fusion
多传感器融合
1.
Research on Multisensor Fusion and Navigation for Robot Mower;
割草机器人多传感器融合与导航技术的研究
2.
An on-line surface roughness estimating method based on multisensor fusion via neural networks is presented for the requirement of machine tool intelligent machining.
针对机床智能加工对加工状况监测的要求,文中提出一种在线估计表面粗糙的神经网络多传感器融合方法,用该方法可获得表面粗糙度的较好估计。
3.
The application of multisensor fusion technology in train speed and position measurement is introduced.
阐述多传感器融合在列车测速定位中的应用;通过搭建多传感器融合的列车测速定位实验硬件平台,并利用虚拟仪器软件LabVIEW,实现平台的软件功能;介绍在铁路现场进行的实验及所获得的有效数据。
补充资料:长度测量工具:长度传感器
利用气动﹑电学﹑光学等原理和光电效应等将被测长度转换为空气的压力或流量﹑电量和光强等物理量﹐以获取测量信息的测量元件﹐用於某些长度测量工具中。长度传感器(以下简称传感器)主要由感受元件和转换元件组成。转换元件把感受元件感受的被测长度精确地转换为便於放大和处理的其他物理量。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器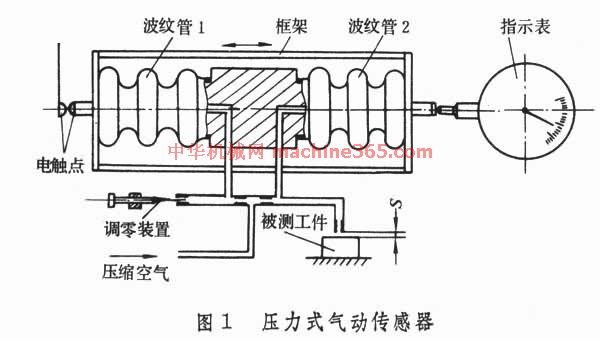 为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。
电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器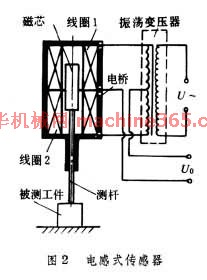 为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。
气动传感器 将被测长度转换为空气压力和流量等﹐用作相对测量(见长度计量技术)的传感器。它的特点是可以用於不接触测量﹐利用内径测头(见气动量仪)可以方便地测量孔径﹐但示值范围小﹐一般为±20~±100微米。图1 压力式气动传感器
为採用波纹管作为尺寸转换和放大元件的压力式气动传感器的工作原理。被测件厚度变化引起间隙S 变化﹐S 变化又引起波纹管内压力变化﹐从而使框架向左或向右移动。移动的距离就是放大了的被测厚度变化﹐通过宽刻度指示表指示出来。也可根据电触点接触与否﹐由指示灯指示被测厚度是否合格。压力式气动传感器还常採用膜片﹑膜盒等作为转换元件。常见的流量式气动传感器主要由测头﹑浮子和锥度玻璃管等组成。 电学传感器 将被测长度直接转换为电量的传感器﹐主要有电感式﹑电容式﹑电接解式﹑压电式﹑磁栅式和感应同步器式等。图2 电感式传感器
为一种管式结构的电感式传感器的工作原理。当磁芯位於线圈1﹑2的中间位置时﹐两线圈產生的电感量相等。此时﹐由线圈1﹑2和振盪变压器次级线圈组成的电桥保持平衡。当带磁芯的测杆上下移动时﹐两线圈產生的电感量不等﹐电桥不平衡﹐有电压0输出。0的大小与测杆移动距离成比例。电感式传感器配以相应的电子放大和指示部分﹐便成为电感测微仪。电感式传感器的分辨率很高﹐可达0.01微米﹐测量范围一般小於2毫米﹐大的可达几十毫米。电容式传感器与电感式传感器的原理相似﹐一般是把线圈和磁芯换成固定极筒和可动极筒﹐当测杆移动时產生的是电容量变化。20世纪80年代初出现了用於电子卡尺的大量程电容传感器﹐测量范围为 150毫米。电接触式传感器是利用电触点副发出电信号判别被测尺寸合格与否的。电触点的移动可由测杆直接传来﹐也可经槓桿或其他机构放大﹐以提高其灵敏度。电接触式传感器主要用於自动测量中。压电式传感器是利用受压变形时会產生电荷的固体材料﹐例如石英晶体﹑鋯鈦酸铝﹑鈮镁酸铝等作为转换元件的﹐主要用於轻便的上置式表面粗糙度测量仪中。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条