1) Train structure formula

轮系结构式
3) spoke structure
轮辐式结构
4) wheel-legged structure
轮式腿结构
1.
A wheel-legged structure with insectival leg configuration in a ground mobile robot was presented in order to improve the terrain adaptability and obstacle climbing capability of the robot.
为了提高地面移动机器人的地面适应性和越障能力,通过模仿昆虫的腿形,在移动机器人机械本体上设计了一种轮式腿结构。
5) structure with two parallel wheels
两轮并列式结构
补充资料:传动:轮系
由一系列轮子组成的传动系统。这些轮子通常是齿轮﹐也可以是摩擦轮等。按轮系中各齿轮的几何轴线是否固定可分为定轴轮系和行星轮系。
定轴轮系 各轮的几何轴线位置都固定不动﹐它的传动比为
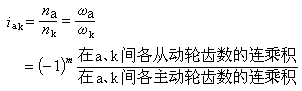
式中na﹑nk和wa﹑wk分别为齿轮a和齿轮k的转速和角速度﹔係数(-1)m中的m为该轮系中外嚙合齿轮对数﹐m为偶数时﹐係数为正值﹐表示主动轮和从动轮转向相同﹔m为奇数时﹐係数为负值﹐表示主动轮和从动轮转向相反。m只适用於平行轴的定轴轮系。定轴轮系主要适用於下列情况﹕(1)大的传动比。一般一对齿轮的传动比不宜过大﹐例如要求实现传动比为100﹐若仅用一对齿轮﹐则大轮直径将为小轮直径的100倍﹐若採用三级的轮系﹐则大轮直径可大为减小。(2)较大的轴间距。如两轴距离较大﹐採用一对齿轮传动﹐则两齿轮直径势必很大。若在中间加一个或几个齿轮﹐齿轮尺寸即可缩小。(3)变速或变向﹐用变速机构改变轮系的传动比(见变速器)以实现变速﹔或设置中间轮以改变从动轴的转向。这种只改变从动轮转向不改变原传动比大小的中间轮称为惰轮。(4)用一个主动轴带动若干要求不同转速﹑转向的从动轴﹐或用若干从动轴带动同一主动轴。定轴轮系的效率等於串联的各对齿轮传动效率的连乘积。
行星轮系 其特点﹑应用﹑传动比和效率参见行星齿轮传动。
定轴轮系 各轮的几何轴线位置都固定不动﹐它的传动比为
式中na﹑nk和wa﹑wk分别为齿轮a和齿轮k的转速和角速度﹔係数(-1)m中的m为该轮系中外嚙合齿轮对数﹐m为偶数时﹐係数为正值﹐表示主动轮和从动轮转向相同﹔m为奇数时﹐係数为负值﹐表示主动轮和从动轮转向相反。m只适用於平行轴的定轴轮系。定轴轮系主要适用於下列情况﹕(1)大的传动比。一般一对齿轮的传动比不宜过大﹐例如要求实现传动比为100﹐若仅用一对齿轮﹐则大轮直径将为小轮直径的100倍﹐若採用三级的轮系﹐则大轮直径可大为减小。(2)较大的轴间距。如两轴距离较大﹐採用一对齿轮传动﹐则两齿轮直径势必很大。若在中间加一个或几个齿轮﹐齿轮尺寸即可缩小。(3)变速或变向﹐用变速机构改变轮系的传动比(见变速器)以实现变速﹔或设置中间轮以改变从动轴的转向。这种只改变从动轮转向不改变原传动比大小的中间轮称为惰轮。(4)用一个主动轴带动若干要求不同转速﹑转向的从动轴﹐或用若干从动轴带动同一主动轴。定轴轮系的效率等於串联的各对齿轮传动效率的连乘积。
行星轮系 其特点﹑应用﹑传动比和效率参见行星齿轮传动。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条