1) bogie with indepen-(dent) rotating wheels

独立旋转车轮转向架
2) independent rotating wheel
独立旋转车轮
1.
The dynamics model of the vehicle with independent rotating wheels is set up,and the program is compiled for simulation analysis.
建立了独立旋转车轮车辆的动力学模型,并编制程序进行仿真分析。
3) independently rotating wheel
独立旋转车轮
1.
Gauge-changeable bogie with independently rotating wheel;
独立旋转车轮变轨距转向架
2.
Guiding principles of three different modes of wheel-rail systems, traditional wheelset, independently rotating wheel and coupling wheelset, are analyzed in details.
详细分析了传统轮对、独立旋转车轮及耦合轮对等3种不同模式轮轨系统的导向机理,认为传统轮对虽然存在蛇行运动,但其自身却具有直线上的自动对中能力和曲线上的自动导向能力,应用也较广;独立旋转车轮虽然不存在蛇行运动,但在直线上的自动复原能力不如传统轮对,近年来在城市轨道车辆上被广泛采用;耦合轮对兼具前二者的优点,但其工程化尚有难度,相信不久的将来会成功地应用于铁道车辆中。
4) IRW
独立旋转车轮
1.
Research on the Creepages of Independently Rotating Wheels(IRW);
独立旋转车轮轮轨蠕滑率研究
2.
The difference of lateral dynamics due to different coupling degree of left-and-right independently rotoating wheels (IRW) was studied.
研究了独立旋转车轮转向架因其左右独立车轮的耦合程度不同, 而造成的横向动力学性能差异的原因。
3.
Without longitudinal creep,the critical velocity of hunting is higher to railway vehicle with independently rotating wheel(IRW),this may be potential application to high-speed locomotive and vehicle ;In the meantime, By virtue of crank axle and even no axle ,it can solve partial or complete low floor in right rails.
独立旋转车轮转向架车辆由于不存在轮轨纵向蠕滑,故具有较高的蛇行运动临界速度,对高速机车车辆具有很大的潜在应用价值;同时,由于车轴可做成曲轴或采用无公用轴,其可实现城市轨道轻轨交通车辆的部分低地板或全低地板,国内外机车车辆研究人员在这方面进行了大量的理论研究和试验研究。
5) independently rotating wheels
独立旋转车轮
1.
Creep traits analysis of wheel-rail contact about independently rotating wheels;
独立旋转车轮轮轨接触蠕滑特性分析
2.
Compared with traditional wheelsets,independently rotating wheels have high critical speed and well curving performance on the ideal line without interfer, since independently rotating wheels have no logntitudinal creepage between wheel and rail.
同传统的整体轮对相比 ,独立旋转车轮由于理论上不存在轮轨间的纵向蠕滑 ,在理想化的、无激扰的线路上具有较高的临界速度和较好的曲线通过性能。
3.
Independently rotating wheels which have no hunting motion in theory have a high critical speed in straight track , noises between wheel and rail may be removed in the sharp curve because longitudinal creepage of independently rotating wheels may be eliminated.
独立旋转车轮能够消除轮轨间的纵向蠕滑 ,理论上不存在蛇行运动 ,故在直线上可以获得较高的临界速度 ,在曲线上可使因纵向蠕滑而产生的轮轨噪音消失。
6) Independently Rotating Wheel(IRW)
独立旋转车轮(IRW)
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
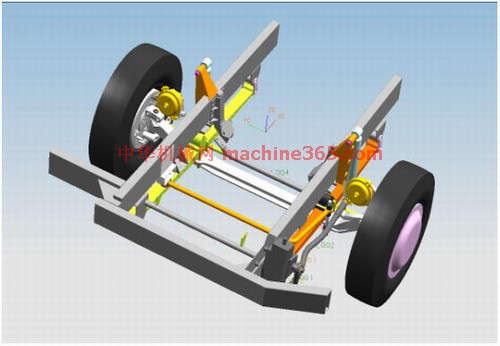
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
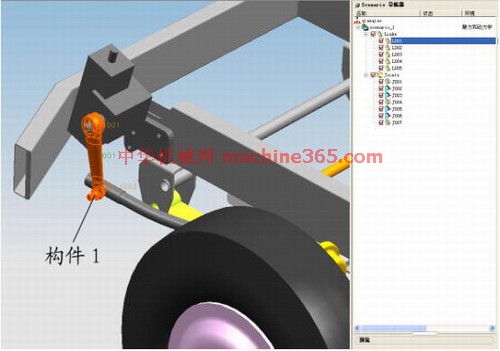
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条