1) oversteering
[,əuvə'stiəriŋ]

过多转向
1.
The results show that the fuzzy PI controller and the control strategy suppress the vehicle oversteering or understeering by the effective control of the brake force an.
结果表明:所设计的模糊PI控制器及控制策略可以通过制动力控制有效地抑制汽车的过多转向或不足转向趋势,提高汽车的操纵稳定性。
2) oversteer
[英]['əuvəstiə] [美][,ovɚ'stɪr]
转向过度
1.
The working principles that prevent the understeering and oversteering is given in this paper.
汽车动态稳定控制(DSC)系统在汽车高速转弯将要出现失控时,可有效地增加汽车稳定性来减少事故的发生,本文说明了其工作原理,阐述了其防止转向不足和转向过度的控制方法。
3) oversteering
[,əuvə'stiəriŋ]
过度转向
4) multi-axle steering
多桥转向
1.
Research on handling stability of multi-axle steering all terrain crane;
多桥转向全路面起重机操纵稳定性研究
2.
Dynamic equations of a 3 degree-of-freedom model for the multi-axle steering system of the truck-howitzer including the vehicle body side-sway characteristic was derived,a dimension reduction observer for rebuilding the vehicle state was constructed,and a vehicle steering controller based on the optimal tracking strategy was designed.
建立了包含车身侧倾特性的车载式火炮多桥转向三自由度模型动力学方程普适公式,并构造了用于重构车辆状态的降维观测器,设计了基于最优跟踪控制策略的车辆转向控制器。
5) multi-wheel steering
多轮转向
1.
Steering control modes for multi-wheel steering system;
多轮转向系统转向控制模式综述
6) Multi-axle steering
多轴转向
1.
Steering performance of multi-axle steering vehicle
多轴转向车辆的转向性能
2.
This doctoral dissertation has been finished on the foundation of the innovation fund of Jilin university,‘multi-axle steering system research of special truck’.
论文展开了多轴转向车辆转向性能的研究。
补充资料:NX Senairo Motion 在车轮转向运动分析中的应用
前言:转向分析是开发新车新型换装车桥过程中重要的设计分析环节。现在用功能强大的UG软件作为设计分析工具提高了工作效率与工作质量,同时通过UG运动模块的动态模拟分析更便于对设计结果的验证与检查、评审。大大提高了设计的准确性,设计结果与实际产品状态非常一致。本文主要对UG运动分析模块在转向分析中的应用做详细的介绍。
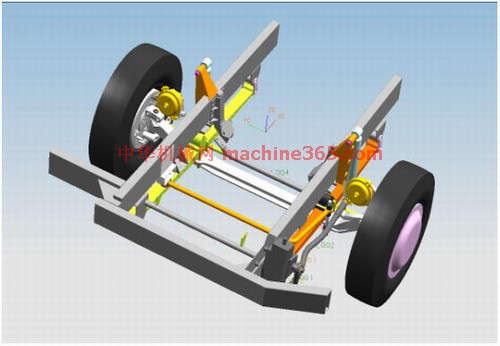
运动分析模型的建立:
根据转向系设计参数、产品图纸对转向分析所涉及的部件进行了建模。建模部件如下:车架总成(前面部分)、前桥总成、车轮总成、转向系统各部件、前悬架系统各部件。建模如下图:
建模过程:
1.根据设计参数及零件图建立各个零件的数模,尽量做成实体。通过对转向运动特点的分析可确定哪些部件只做出外形尺寸即可不需要做其内部结构,哪些部件要做出具体的结构。这样可以简少建模时间,提高工作效率。
2.建立装配主模型。把建好的各个部件按底盘布置参数要求装配好。
3.检查及评审装配主模型,准备进入运动分析模块。
运动分析:
进入UG运动分析模块,创建机构Scenario模型如下图:
1.设置机构分析环境为动态,即调用了静力和动力学仿真分析算解器。
2.运动分析名称为默认的scenario_1。
3.进入运动分析参数预设置,改变图标比例为3,角度单位为度,设置全局重力系数如下:
因为考虑到转向分析的特点,转向纵拉杆两头由球面副连接,拉杆形状为在沿Y方向的拉杆轴平面上向内弯(为左转向轮转向运动让空间),故设置重力系数为Gy=1,以保证拉杆在运动分析过程中内弯形状一直沿Y方向。其它部件由于受运动副限制其运动不受此参数影响。(以上关于球面副运动问题,我认为软件应该有所改进,使分析过程的参数与实际情况更一致)
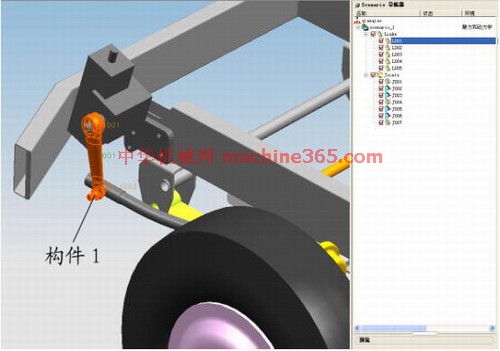
4.创建构件(Links)
根据转向分析的需要,这里创建了5个构件。如图所示:
构件1(L001): 转向垂臂与转向纵拉杆前球头
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条