1) harmonic track

谐波跟踪
2) syntonic follow
谐振跟踪
3) tracking filter
跟踪滤波
1.
On the basis of the extended Kalman Filter(EKF) and the decaying extended Kalman Filter,this paper makes use of the modified strong tracking filter(STF) to estimate the maneuvering target information without all measurement information.
针对空空导弹制导过程中可能出现测量信息不全的情况,以机动目标的“当前”统计模型为基础,在螺旋机动目标模型下对机动目标进行了跟踪滤波。
2.
A new tracking filter was proposed for the highly non-linear single observer passive location and tracking(SOPLAT)system,where the common tracking filters often failed to catch and kept tracking of the emitter.
针对单站无源定位跟踪系统非线性较强、传统跟踪滤波方法收敛速度、慢容易发散的问题,提出了一种新的跟踪滤波算法P-EKF。
3.
But to the CW pulse signal with changing frequency, it is difficulte to realize tracking filter with common narrowband filter.
但是,对于中心频率不断变化的CW脉冲信号,使用常规的硬件窄带滤波器很难实现对其跟踪滤波。
4) clutter tracking
杂波跟踪
1.
Image segmentation methods applied for Airborne Pulse doppler clutter tracking;
图像处理方法在PD雷达杂波跟踪中的应用
2.
This paper introduces a clutter tracking technique used for airborne PD radar.
介绍一种适用于机载PD雷达的杂波跟踪技术 ,结合机载PD雷达杂波分布特征和模糊C均值算法的特点 ,将模糊C均值算法用于杂波跟踪 ,给出了相应的算法流程 ,并提出了一种确定初始模糊隶属度的方法 ,经仿真数据验证 ,取得了满意的结
3.
Based on clutter tracking,we proposed CF(clutter feature) CFAR detector and SE(structuring element) CFAR detector,analyzed and simulated their detection performance by the Monte Carlo method.
本文介绍了对抗杂波边缘的自适应CFAR检测器设计中的研究工作 ,设计了基于杂波跟踪的杂波属性CF(clutterfeature) CFAR检测器和结构元素SE(structuringelement) CFAR检测器 ,对其检测性能进行了分析 。
6) carrier tracking
载波跟踪
1.
Design and realization of carrier tracking for GNSS receiver
卫星定位接收机载波跟踪的设计与实现
2.
Technology of carrier tracking for high dynamic signals based on FLL and PLL cascade
基于FLL与PLL级联的高动态载波跟踪技术
3.
This paper introduces the principles of code acquisition and carrier tracking for high dynamic GPS receivers,and gives a technical method to realize the digital dynamic carrier tracking with the PLL+FLL based on DSP.
介绍了高动态GPS接收机的码捕获与载波跟踪的原理,设计了一种基于高速数字信号处理(DSP)技术的PLL+FLL环混合全数字高动态载波跟踪技术方案,同时给出了一种在连续高动态下载波跟踪算法即基于交叠离散傅里叶变换的频率跟踪算法(ODAFC),并对此算法进行了仿真验证。
补充资料:传动:谐波传动
由波发生器﹑柔性件和刚性件 3个基本构件组成的机械传动。这种传动是在波发生器的作用下﹐使柔性件產生弹性变形并与刚性件相互作用而达到传递运动或动力的目的。在传动中波发生器迴转一周﹐柔性件上某一点循环变形的次数称波数。柔性件的变形过程是一个基本对称的谐波(图1 双波柔轮的变化波形 )﹐故称为谐波传动。常用的谐波传动是双波传动。
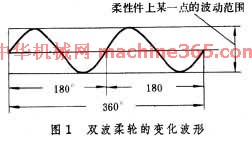
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。

谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。
谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条