1) portable coordinate measuring arm(PCMA)

便携式三坐标测量臂
1.
Based on the standard provided by a high-accuracy orthogonal coordinate measuring machine(CMM),a new technique for 3D coordinate position error calibration of portable coordinate measuring arm(PCMA) is presented.
本文提出了用高精度正交三坐标测量机作为空间位置基准,校准便携式三坐标测量臂空间位置误差的方法。
2) cantilever type CMM
悬臂式三坐标测量机
1.
In order to enhance the measurement precision of the cantilever type CMM,this paper introduces the quasi-rigid body mathematical model developed by analyzing every errors sources and depending on the theory of homogeneous coordinate and offers geometric errors model specially designed to compensate for the 21 geometric errors with a greater impact on measuring accuracy.
为提高悬臂式三坐标测量机的测量精度,对其各项误差源进行了分析,使用齐次坐标变换理论建立了测量机的准刚体测量模型,并在其基础上建立了几何误差模型对影响测量机精度较大的21项几何误差进行补偿。
3) coordinate measuring arm
坐标测量臂
1.
The global calibration of sensor coordinate is accomplished by coordinate measuring arm and laser tracker for better precision and efficiency.
根据大尺寸测量系统的现状,从分析线结构光入手,提出了组建传感器对测量方法,使每对传感器具备差动测量能力,提高单点测量精度;利用坐标测量臂和激光跟踪仪的大尺寸测量能力,对传感器坐标系进行全局校准,提高校准的精度和效率;研究椭圆检测算法,提出利用椭圆平行弦中点连线必过椭圆中心基本定理,求出椭圆中心坐标,拟合出椭圆形状;通过理论分析,该方法切实可行。
5) flexible three-coordinate measuring arm
柔性三坐标测量臂
1.
A flexible three-coordinate measuring arm(CMA) with 6-DOF is studied.
对一种6自由度的柔性三坐标测量臂进行了研究分析,推导出了其测量方程与测头位置的误差方程,并以此为基础,尝试对各个杆件长度参数进行优化分析,使得测头位置误差达到最小。
6) articulated coordinate measuring machine
关节臂式坐标测量机
1.
Virtual prototyping model and simulation of articulated coordinate measuring machine
关节臂式坐标测量机的虚拟样机模型及仿真
补充资料:长度测量工具:三坐标测量机
能在X﹑Y﹑Z 3个或3个以上坐标(圆转台的一个转轴习惯上也算作一个坐标)内进行测量的通用长度测量工具。主要用於测量复杂形状表面轮廓尺寸﹐例如透平叶片﹑显象管屏幕﹑凸轮和轿车等轮廓尺寸﹑箱体零件各孔的孔径和坐标尺寸等﹔还常与加工中心配套﹐成为柔性製造系统的一个组成部分。按自动化程度﹐三坐标测量机(简称测量机)一般分为手动的﹑自动的和计算机数字控制的3种。手动的由人工完成对被测长度的全部测量过程。自动测量机由测头自动完成对被测长度的瞄準定位﹐由人工完成其他测量过程。计算机数字控制测量机除具有自动瞄準定位的功能外﹐还能按照预先编制好的程序自动完成全部测量和计算过程。测量机按用途又可分为坐标测量机和万能测量机两类。前者是20世纪50年代中期出现的﹐常用於测量某种类型的工件﹐测量效率较高﹐适宜於在车间使用。这类测量机规格很多﹐测量范围可达10000×1600×1000毫米或更大。万能测量机是从坐标鏜床的基础上发展而来的﹐测量精度高﹐单坐标精度可达 2微米/1000毫米以上。它带有不同测头和较多附件如数字显示分度台﹑具有精密轴系的迴转工作台等﹐测量功能较多﹐适宜在计量室使用。
测量机按结构主要分为悬臂式﹑门式和单立柱式3种类型(图1 三坐标测量机的类型 )。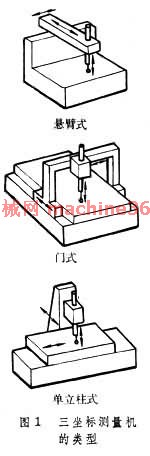 大﹑中型测量机常採用气浮导轨和花岗石做的工作台(图2 三坐标测量机的导轨和工作台 )。
大﹑中型测量机常採用气浮导轨和花岗石做的工作台(图2 三坐标测量机的导轨和工作台 )。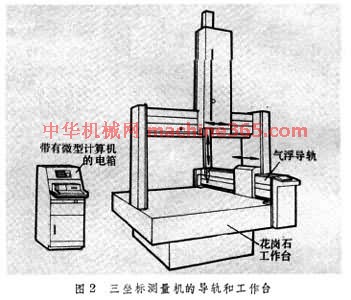 测量机的每个坐标各有独立的测量系统。常用的测头有刚性的﹑单向的﹑双向的﹑三向的和光学不接触的等。
测量机的每个坐标各有独立的测量系统。常用的测头有刚性的﹑单向的﹑双向的﹑三向的和光学不接触的等。
测量机一般都配备电子计算机。它可以根据测得的被测件上的三维坐标值﹐迅速地进行数学运算﹐计算出被测表面的几何尺寸和相互位置尺寸﹐通过阴极射线管(CRT)﹑打印机和X -Y 绘图仪等外围设备分别显示﹑打印出测量结果或描绘出被测图形。它还能自动补偿由於被测件定位不正确﹑测量曲面时由於测头曲率半径引起的测量误差和测量机本身的系统误差等。
70年代以来在测量机上广泛应用电子计算机后﹐它的性能和自动化程度都大为提高﹐使用范围也更广泛﹐已成为机械製造业中发展最快的现代量仪之一。(见彩图 三坐标测量机 )
测量机按结构主要分为悬臂式﹑门式和单立柱式3种类型(图1 三坐标测量机的类型 )。
大﹑中型测量机常採用气浮导轨和花岗石做的工作台(图2 三坐标测量机的导轨和工作台 )。测量机的每个坐标各有独立的测量系统。常用的测头有刚性的﹑单向的﹑双向的﹑三向的和光学不接触的等。 测量机一般都配备电子计算机。它可以根据测得的被测件上的三维坐标值﹐迅速地进行数学运算﹐计算出被测表面的几何尺寸和相互位置尺寸﹐通过阴极射线管(CRT)﹑打印机和X -Y 绘图仪等外围设备分别显示﹑打印出测量结果或描绘出被测图形。它还能自动补偿由於被测件定位不正确﹑测量曲面时由於测头曲率半径引起的测量误差和测量机本身的系统误差等。
70年代以来在测量机上广泛应用电子计算机后﹐它的性能和自动化程度都大为提高﹐使用范围也更广泛﹐已成为机械製造业中发展最快的现代量仪之一。(见彩图 三坐标测量机 )
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条