|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
1) combination principle

组合原理
1.
0 as the developing tools,based on combination principle concept innovation design theory and method,the Product form innovative design system was developed.
0为开发工具,运用基于组合原理的概念创新设计理论与方法,以Pro/E为开发平台,设计开发了产品形态创新设计系统。
2.
This paper analysed the current application status,advantages and disadvantages of combination principle and generic algorithm.
通过分析组合原理与遗传算法在产品形态设计领域的应用现状与各自的优缺点,提出了一种利用组合原理与遗传算法在形态设计中的优点进行产品形态创新设计的混合算法,阐述了该算法的应用方式与步骤。
2) combination die principle
组合模具原理
3) the optimal principle
最优组合原理
1.
In order to choose the optimal model for water demand forecasting, a combined forecasting method based on the optimal principle was put forward.
针对用水量预测组合模型的优选问题,根据海河流域1988-2003年生活用水量时间序列的具体变化特征和拟合精度进行组合模型初选,并引入最优组合原理,确定组合权系数。
4) mechanism combination theory
机构组合原理
1.
A basic mechanism is described in matrix representation based on the mechanism combination theory.
作者基于机构组合原理,用矩阵形式描述基本机构,给出了串联式、并联式和混合式3种基本机构的组合方式的符号表达方法。
5) combined sensing principle
组合敏感原理
1.
To solve the weak signal detecting problem in MEMS resonant pressure sensor,and improve its reliability and dynamic response,a combined sensing principle that appends an assistant sensor to former sensor structure was presented.
为解决硅微机械谐振式压力传感器的微弱信号检测问题,并改善其可靠性和动态响应,提出在传感器原有结构上增加辅助传感器,构成组合敏感原理。
6) portfolio theories
投资组合原理
1.
This dissertation applies portfolio theories to real estate investment in order to evaluate the feasibility of this application in the developing countie.
首先,介绍投资组合原理,从风险、收益的定义开始分析了马考维茨模型,资本资产定价模型,套利定价模型,单指数模型和多指数模型,并指出各个模型的优缺点。
补充资料:机械原理:组合机构
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|
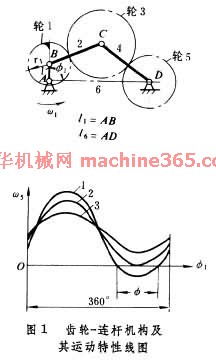 )。轮Ⅰ与曲柄固接﹐以角速度
)。轮Ⅰ与曲柄固接﹐以角速度 1作等速转动﹐从动轮 5为输出件﹐其角速度
1作等速转动﹐从动轮 5为输出件﹐其角速度  1的函数。当曲柄AB 等速连续转动时﹐从动轮 5能实现多种规律的迴转运动。求任一给定
1的函数。当曲柄AB 等速连续转动时﹐从动轮 5能实现多种规律的迴转运动。求任一给定