1) artillery components

火炮零部件
1.
Based the leap-frog ball coordinate conversion principle flexible three coordinates measuring,portable-type measuring basement and computer real-time manipulation and data processing technology,this paper researched the measuring method for deformation quantity of artillery components and developed the measuring system.
针对火炮零部件变形量进行测量时存在着结构复杂、几何尺寸范围大等特点,基于蛙跳式坐标变换原理、柔性三坐标测量原理、移动式测量基座技术和计算机实时控制与数据处理技术,提出了一种用于火炮零部件变形量测量的方法,并研制了测量系统。
2.
A system based on flexibility three coordinate machine for measuring the artillery components deformation quality was discussed detailedly in the paper,and the system composition,general construction,working principle and the deformable value measuring method were also put forward.
针对火炮零部件变形量的测量问题,结合柔性三坐标机的测量原理,设计了基于柔性三坐标机的火炮零部件变形量测量系统。
2) artillery zero line
火炮零线
3) ignition component check
点火零部件检查
4) ignition system component
点火系统零部件
5) A battery of cannons; artillery.
火炮部队;炮兵
6) ignition system component check
点火系统零部件检查
补充资料:SL1126内燃机零部件数字化建模
1、 SL1126内燃机总成
SL1126内燃机是由机体总成、缸盖总成、运动机构总成,其它机构总成等组成,见图I。
(1)机体总成主要由:机体、油底壳、风扇、油标、同步齿轮室盖、主副曲轴轴承盖、标尺及相应的标准零件。在机体总成中,机体是主要的设计零件。
(2)气缸盖总成主要包括的零件有:气缸盖、缸盖罩、喷油嘴、机油筒、空气滤清器等零件;其中气缸盖是主要设计零件。
(3)运动机构总成由活塞,滑块,活塞销,连杆,连杆配件,主、副曲轴总成,正视齿轮总成,凸轮轴总成以及气门挺杆总成等组成。
(4)其他机构总成有:机油泵总成,喷油泵总成等组成。
SL1126内燃机是由机体总成、缸盖总成、运动机构总成,其它机构总成等组成,见图I。
(1)机体总成主要由:机体、油底壳、风扇、油标、同步齿轮室盖、主副曲轴轴承盖、标尺及相应的标准零件。在机体总成中,机体是主要的设计零件。
(2)气缸盖总成主要包括的零件有:气缸盖、缸盖罩、喷油嘴、机油筒、空气滤清器等零件;其中气缸盖是主要设计零件。
(3)运动机构总成由活塞,滑块,活塞销,连杆,连杆配件,主、副曲轴总成,正视齿轮总成,凸轮轴总成以及气门挺杆总成等组成。
(4)其他机构总成有:机油泵总成,喷油泵总成等组成。
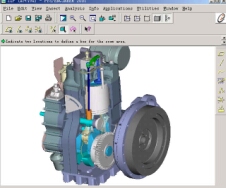
图I SL1126内燃机总成
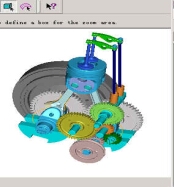
图II 内燃机运动机构总成
2、自顶向下设计的参数化技术
在CAD中,参数化技术是采用参数预定义的方法建立图形的集合约束集,指定一组尺寸作为参数使其与几何约束集相关联,并将所有的关联式融入到应用程序中,然后以人机交互方式修改参数尺寸,通过参数化尺寸驱动实现对设计结果的修改。参数化设计过程中,参数与设计对象的控制尺寸有明显的对应关系,并具有全局相关性。参数化设计不同于传统的设计,它储存了设计的整个过程,能设计出一族而非单一的在形状和功能上具有相似性的产品模型。正是有了这种参数化建模技术,才使得数据的改变在不同层次(如不同的子装配系统和不同的零件)之间的传递变得唯一个即时。这样,才有了真正意义上的自顶向下设计及以这种设计为基础的并行设计,后者是团队设计的基础。
下面以主同步齿轮零件三维参数化为例:
下面为渐开线方程:
alpha=20
m=4
z=46
r0=0.5*m*z*cos(20)
t0=t*40
x0=(cos(t0)+t0*pi/180*(sin(t0)))*r0
y0=(sin(t0)-t0*pi/180*(cos(t0)))*r0
theta=-(tan(alpha)-alpha*pi/180)*180/pi-90/z
x=x0*cos(theta)-y0*sin(theta)
y=x0*sin(theta)+y0*cos(theta)
z=0
其中alpha为压力角, m为模数, z为齿数, r0为基圆半径。

图III 齿轮总成
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条