1) harmonic component

谐波成分
1.
The analysis of the geometric relationship between the two mechanisms and that of the harmonic components of the motion trajectory at a reference point on the plane of a.
通过对两机构间的几何关系分析和连杆平面上一参考点运动轨迹谐波成分分析以及机构运动仿真演示,证明了这两个机构为轨迹同源机构,并揭示了这种同源机构基本结构尺寸型间的内在联系。
2.
Through analyzing the harmonic component of the coupler curve of RCCC mechanism,the relationship between the harmonic component of the rotation-angle function and the dimensional type of the RCCC mechanism was discovered.
借助傅里叶级数理论,对RCCC机构连杆曲线进行了快速傅里叶变换,得到了由谐波成分表示的任意RCCC机构连杆轨迹的数学描述。
2) Harmonic Components
谐波成分
1.
The harmonic components of coupler rotation angle function of the four bar mechanism which is corresponding to equation solution can be gotten with fast Fourier transfer method.
然后经过快速傅立叶变换得到与方程精确解对应的四杆机构连杆转角函数的谐波成分 ,利用这些谐波成分参数 ,通过模糊识别的方法 ,从已建立的四杆机构连杆转角函数谐波特征参数的“数值图谱”中找到更多满足要求的机构。
3) Consonance energy
谐波成分能量
4) harmonic imaging
谐波成像
1.
Objective: In order to suppress tissue harmonic in contrast harmonic imaging, a suppression method based on coded pulse technique is explored.
目的:为有效地抑制造影谐波成像中组织谐波的影响,探求一种基于编码脉冲技术的抑制方法。
2.
The development of ultrasonic imaging diagnostic technique is mainly introduced and various kinds of ultrasonic imaging diagnostic techniques are mentioned including A-mode,M-mode and B-mode ultrasonic diagnostic techniques,Doppler imaging technique,3D imaging technique and harmonic imaging technique.
主要论述超声图像诊断技术的发展历史和A型、M型、B型超声诊断技术、超声多普勒成像技术、三维成像技术以及谐波成像技术及其临床应用现状。
3.
In the past 20 years,the imaging technique of ultrasound imaging equipment has made much progress in harmonic imaging,coherent imaging,Doppler imaging and frequency spectra analysis.
近20年来 ,超声成像设备在电脑超声成像技术 ,谐波成像技术 ,相干处理成像技术 ,多普勒频移成像技术 ,回波频谱分析技术等方面取得了重大进展。
5) weighted amplitude wave superposition (WAWS)
谐波合成
1.
Based on the basic features of fluctuating wind and Davenport wind speed spectrum,in this paper a method to simulate the fluctuating wind field of transmission tower-line system by weighted amplitude wave superposition (WAWS) method which is improved by decimation-in-time fast Fourier transform (DIT-FFT) in time domain is proposed.
文章基于脉动风的基本特性和Davenport风速谱,提出了时域法中基于按时间抽取的快速傅里叶变换技术改进的谐波合成法,然后对输电塔线体系的脉动风场进行了仿真,结果表明,仿真的脉动风速与实际风速一致,仿真的风场符合脉动风的空间相关性规律,计算效率得到了提高。
6) formation of harmonic
谐波成因
补充资料:传动:谐波传动
由波发生器﹑柔性件和刚性件 3个基本构件组成的机械传动。这种传动是在波发生器的作用下﹐使柔性件產生弹性变形并与刚性件相互作用而达到传递运动或动力的目的。在传动中波发生器迴转一周﹐柔性件上某一点循环变形的次数称波数。柔性件的变形过程是一个基本对称的谐波(图1 双波柔轮的变化波形 )﹐故称为谐波传动。常用的谐波传动是双波传动。
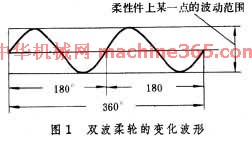
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。

谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。
谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条