1) DOFs constraining principle

自由度约束原理
1.
The DOFs constraining principle was firstly formulated to describe the relationship between the machining dimensions and the DOFs to be theoretically constrained.
建立了描述加工尺寸与应限制自由度之间关系的自由度约束原理;巧妙地将齐次线性方程组解的性质和工件的各种定位方案联系起来,提出了定位合理性的判定定理;最后提出了不合理定位方案产生原因的判定依据,以指导工艺人员能够合理地设计夹具。
2) freedom constraint
自由度约束
1.
Discontinuous element is employed to discretize boundary integral cquations to circumvent freedom constraints in coupling approach.
采用非连续元离散边界积分方程,解决了耦合分析中的自由度约束问题。
2.
By virture of the discontinuous elements, the freedom constraint is circumvented in multi region boundary element analysis.
将超参非连续元用于多域边界元分析,解决了自由度约束问题。
3) node pinned
节点自由度约束
4) master/slave freedom
主从自由度约束法
5) free limiting layer
自由约束层
1.
Study on the theoretical thickness of the free limiting layer and experiments in laser shock processing;
激光冲击自由约束层理论厚度及实验研究
2.
This paper studies the thickness of the free limiting layer in the laser shock processing.
针对激光冲击强化应用技术中的自由约束层厚度的问题 ,分析了涂层气化、爆炸形成的向金属层内部和自由约束层内部传播的高强度压力、自由约束层与涂层之间的粘着力和约束层本身性能之间的关系。
补充资料:机械原理:机构自由度
机构自由度
使机构具有确定运动时所必须给定的独立运动数目。图 平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图
平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图 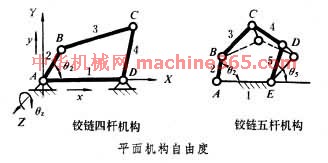 平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。
平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。
一般机构的自由度可凭经验根据几何位置关係直接决定﹐但常需要通过计算进行验证或作进一步分析。平面机构自由度数的计算公式为
F =3-2P 1-P h (1)
式中为一个平面机构中活动构件数(机架作为参考坐标系不计算在内)﹐每个活动构件有3个自由度﹐即图 平面机构自由度中沿X ﹑Y 轴的独立移动和绕轴的独立转动﹔P 1为低副数﹐每个低副引进2个约束﹐即限制2个自由度﹐其中转动副(如图 平面机构自由度 中A )限制x﹑y两个移动﹐移动副限制1个转动和另1个移动﹔P h 为高副数﹐每个高副只引进1个约束﹐即限制1个自由度。
应用平面机构自由度的计算公式时需要注意复合铰链﹐局部自由度和虚约束等几种情况。当几个转动副的轴线重合时称为复合铰链﹐在计算转动副数时不能遗漏。凸轮机构中从动件如带有滚子﹐滚子的自转运动即为局部自由度﹐在计算机构的自由度时应将局部自由度除去不计。机构中引进局部自由度的主要目的是为了减小磨损。虚约束是不起约束作用的约束﹐当一根轴用两个轴承而形成两个轴线并行的转动副时﹐其中一个即为虚约束。机构中引进虚约束仅仅是为了提高零件的刚度或渡过机构的死点﹐但对製造和安装的要求有所提高﹔否则虚约束就成为实约束﹐从而使机构產生卡住现象。
使机构具有确定运动时所必须给定的独立运动数目。图
平面机构自由度 为平面铰链四杆机构﹐当构件2按给定的角位移规律O2=O2(t)运动时﹐其餘各构件的运动就随之确定﹐因而该机构的自由度数为1。构件2是机构中接受外界独立运动的构件﹐称为机构的主动件﹐其餘构件称为从动件。欲使机构具有确定运动﹐应使机构的主动件数等於其自由度数。若机构的主动件数少於机构自由度数﹐如图 平面机构自由度 的平面铰链五杆机构﹐只给定主动件 2一个独立运动参数﹐即构件的角位移规律O2=O2(t)时﹐则其餘构件3﹑4﹑5的运动并不能确定。若机构的主动件数多於自由度数﹐则可能使其中驱动功率较小的主动件被迫变为从动件﹐或使机构卡住不动﹐甚至遭到破坏。但是﹐对於平面铰链五杆机构﹐再给定构件5的角位移规律O5=O5(t)时﹐即同时给定两个独立的运动参数﹐则此五杆机构的运动完全确定。 一般机构的自由度可凭经验根据几何位置关係直接决定﹐但常需要通过计算进行验证或作进一步分析。平面机构自由度数的计算公式为
F =3-2P 1-P h (1)
式中为一个平面机构中活动构件数(机架作为参考坐标系不计算在内)﹐每个活动构件有3个自由度﹐即图 平面机构自由度
中沿X ﹑Y 轴的独立移动和绕轴的独立转动﹔P 1为低副数﹐每个低副引进2个约束﹐即限制2个自由度﹐其中转动副(如图 平面机构自由度 中A )限制x﹑y两个移动﹐移动副限制1个转动和另1个移动﹔P h 为高副数﹐每个高副只引进1个约束﹐即限制1个自由度。 应用平面机构自由度的计算公式时需要注意复合铰链﹐局部自由度和虚约束等几种情况。当几个转动副的轴线重合时称为复合铰链﹐在计算转动副数时不能遗漏。凸轮机构中从动件如带有滚子﹐滚子的自转运动即为局部自由度﹐在计算机构的自由度时应将局部自由度除去不计。机构中引进局部自由度的主要目的是为了减小磨损。虚约束是不起约束作用的约束﹐当一根轴用两个轴承而形成两个轴线并行的转动副时﹐其中一个即为虚约束。机构中引进虚约束仅仅是为了提高零件的刚度或渡过机构的死点﹐但对製造和安装的要求有所提高﹔否则虚约束就成为实约束﹐从而使机构產生卡住现象。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条