
将几个基本机构联接起来﹐以实现单个机构难以实现的复杂运动规律﹑运动轨跡和特殊运动的不可拆机构。基本机构主要包括连杆机构﹑齿轮机构和凸轮机构等。组合机构一般不是将几个基本机构简单的串联起来﹐而是一种较复杂的组合﹐可以是用不同类型的基本机构组成的齿轮-连杆机构﹑凸轮-连杆机构和齿轮-凸轮机构﹐也可以是用同类型的基本机构组成的联动凸轮机构等。组合机构的运动是通过分析各个基本机构的运动关係﹐然后根据不同的组合形式联繫起来获得一个新的运动关係。
齿轮-连杆机构 由1个曲柄摇杆机构(见平面连杆机构)和3个齿轮组成(图1 齿轮-连杆机构及其运动特性线图 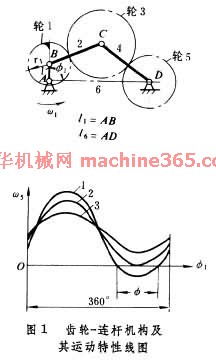 )。轮Ⅰ与曲柄固接﹐以角速度
)。轮Ⅰ与曲柄固接﹐以角速度 1作等速转动﹐从动轮 5为输出件﹐其角速度 5随机构的不同位置而改变﹐是曲柄转角
1作等速转动﹐从动轮 5为输出件﹐其角速度 5随机构的不同位置而改变﹐是曲柄转角 1的函数。当曲柄AB 等速连续转动时﹐从动轮 5能实现多种规律的迴转运动。求任一给定1角时轮 5的角速度 5的方法可分两步进行﹕首先﹐杆1﹑2﹑4﹑6 组成一个铰链四杆机构﹐由 1求出 2和 4﹔然后﹐把轮1﹑轮3和杆2组成一差动轮系﹐把轮3﹑轮5和杆4组成另一差动轮系﹐从而求出 5与2﹑ 4 的关係式。由於杆1与轮1同速﹐杆2和杆4同时为轮系和四杆机构中的构件﹐可将四杆机构中求得的 2和 4代入关係式得 5。这样就可画出 5-1线图。曲线1﹑2﹑3是通过改变l1/r2,或l6 到的逆转﹑瞬时停歇和非匀速转动 3种不同特性。曲线1所对应的角称为逆转角。曲线2的=0﹐理论上是瞬时停歇﹐但由於运动副中的间隙和构件弹性的影响﹐实际上仍有相当於曲柄转45°上下的片刻停歇时间。当逆转角较小时﹐曲线反映不出逆转运动﹐实际上就有更长的停歇时间。齿轮-连杆机构也能实现某些复杂的运动轨跡。
1的函数。当曲柄AB 等速连续转动时﹐从动轮 5能实现多种规律的迴转运动。求任一给定1角时轮 5的角速度 5的方法可分两步进行﹕首先﹐杆1﹑2﹑4﹑6 组成一个铰链四杆机构﹐由 1求出 2和 4﹔然后﹐把轮1﹑轮3和杆2组成一差动轮系﹐把轮3﹑轮5和杆4组成另一差动轮系﹐从而求出 5与2﹑ 4 的关係式。由於杆1与轮1同速﹐杆2和杆4同时为轮系和四杆机构中的构件﹐可将四杆机构中求得的 2和 4代入关係式得 5。这样就可画出 5-1线图。曲线1﹑2﹑3是通过改变l1/r2,或l6 到的逆转﹑瞬时停歇和非匀速转动 3种不同特性。曲线1所对应的角称为逆转角。曲线2的=0﹐理论上是瞬时停歇﹐但由於运动副中的间隙和构件弹性的影响﹐实际上仍有相当於曲柄转45°上下的片刻停歇时间。当逆转角较小时﹐曲线反映不出逆转运动﹐实际上就有更长的停歇时间。齿轮-连杆机构也能实现某些复杂的运动轨跡。