1) Laser probe

激光测头
1.
Improvement on measurement precision of laser probe using image optimization method;
提高激光测头测量精度的图像优化方法
2.
In order to realize non-contact auto-measurement of revolving parts,an offset auto-adjustment device was de- signed by using a laser probe as the feedback control element.
为了满足研制的零件轮廓测量机实现回转体零件的非接触自动测量,利用激光测头等部件设计了偏心自动调整机构。
3.
A stereovision inspection system for measuring free-form surface is introduced which consists of coordinate measuring machines (CMM) and a laser probe.
介绍了利用安装于三坐标测量机CMM上的激光测头测量自由曲面的立体视觉检测系统。
2) laser probe head
激光测头
1.
A precise and fast 3D coordinate measuring machine, which is composed of a laser probe head and servomechanism with high performance, was developed utilizing precise control, positioning optimization, approximation of deceleration with three levels broken line, online position correction and smoothing algorithm.
开发了一种高精度三维坐标测量机,它包括一套激光测头系统和高性能的伺服机构,具有精确控制、定位优化、三级减速近似、在线位置修正和光滑算法等功能。
3) Laser triangular measuring device
激光测微头
1.
For its advantages of high precision, fast speed, portable size, good reliability, non-contact measurement, the laser triangular measuring device is extensively used in size and distance measurement and product on-line examination.
激光测微头因其测量精度高、速度快、体积小、稳定、不接触被测物体的表面等优点在测量物体尺寸和位移中被广泛应用,在工业产品在线检测中能有效的减少人工测量的劳动强度,提高生产效率。
4) Laser Scanner
激光测量头
1.
Research on Parameter Calibration and Location Calibration of Laser Scanner in Articulated CMM;
关节式坐标测量机激光测量头参数及位置标定研究
5) Non-contact Laser Probe
非接触激光测头
1.
Calibration System for Surveying Axis of Non-contact Laser Probe;
非接触激光测头测量轴线标定系统
6) laser triangulation probe
激光三角法测头
1.
This system consists of a laser triangulation probe,a probe head and a coordinate measuring machine (CMM).
提出了一种基于坐标测量机、测头回转体和激光三角法测头的非接触三维测量系统 ,并介绍了测量系统的工作原理 。
补充资料:长度计量技术:激光测长技术
利用激光单色性和方向性好的特性测量长度的长度计量技术。常用的方法有干涉法﹑扫描法﹑光强法和準直法等。
干涉法 利用光波干涉现象精密测长的方法。两束具有相同频率﹑相位和振动方向的光波S 1﹑S 2﹐经过不同的光程后在空间相交。当光程差等於波长整倍数时﹐波峰与波峰相遇叠加﹐光亮加强﹐出现亮的干涉条纹﹔当光程差等於半波长的奇倍数时﹐波峰与波谷相遇﹐光亮减弱﹐出现暗的干涉条纹。这种现象称为光波干涉现象(图1 光波干涉现象 )。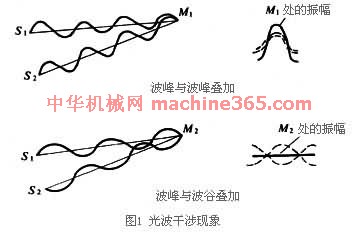 利用干涉法测量位移的原理(图2a 干涉法测量 )
利用干涉法测量位移的原理(图2a 干涉法测量 ) 是﹕从光源发出的光﹐经分光镜分为两路。一路透过分光镜射向可动反射镜1 ﹐另一路由分光镜反射到固定反射镜2﹐并分别从1和2反射回来﹐经过分光镜叠加在接受屏上。每当1移动1/2波长时﹐接受屏上的干涉条纹就会出现一次由暗到亮或者由亮到暗的变化。计算这些明暗变化次数就可以计算出1 的移动量。利用这一原理测量位移的光学系统称为迈克耳逊干涉系统。激光干涉仪就是用这个系统来测长的。
是﹕从光源发出的光﹐经分光镜分为两路。一路透过分光镜射向可动反射镜1 ﹐另一路由分光镜反射到固定反射镜2﹐并分别从1和2反射回来﹐经过分光镜叠加在接受屏上。每当1移动1/2波长时﹐接受屏上的干涉条纹就会出现一次由暗到亮或者由亮到暗的变化。计算这些明暗变化次数就可以计算出1 的移动量。利用这一原理测量位移的光学系统称为迈克耳逊干涉系统。激光干涉仪就是用这个系统来测长的。
此外﹐干涉法还可用於平面度测量和微量变形测量。后者是通过全息照相实现的(图2b 干涉法测量 )。 由激光器发出的光束经分光镜分为两路。一路经反射镜1反射后成为参考光束射向感光胶片﹐另一路经反射镜2反射后射向被测物﹐再由被测物反射后也射向感光胶片。此光束和参考光束在感光胶片上叠加后產生干涉图样。干涉图样的形状反映被测物反射光束与参考光束的相位差﹐从而反映被测物表面几何形状相互位置的关係。干涉图样的明暗对比程度反映被测物光的强弱(振幅的平方)。这样﹐被测物反射光波的全部信息就被记录下来。这种记录被测物光全部信息的胶片即称为全息照片。用激光照射全息照片﹐就能再现被测物光的立体图象。对被测物在不加载和加载变形条件下双重曝光全息照相后﹐可根据全息照片上的干涉图样计算出变形量﹐也可根据干涉条纹的异常变形分析出被测物的内部缺陷。
由激光器发出的光束经分光镜分为两路。一路经反射镜1反射后成为参考光束射向感光胶片﹐另一路经反射镜2反射后射向被测物﹐再由被测物反射后也射向感光胶片。此光束和参考光束在感光胶片上叠加后產生干涉图样。干涉图样的形状反映被测物反射光束与参考光束的相位差﹐从而反映被测物表面几何形状相互位置的关係。干涉图样的明暗对比程度反映被测物光的强弱(振幅的平方)。这样﹐被测物反射光波的全部信息就被记录下来。这种记录被测物光全部信息的胶片即称为全息照片。用激光照射全息照片﹐就能再现被测物光的立体图象。对被测物在不加载和加载变形条件下双重曝光全息照相后﹐可根据全息照片上的干涉图样计算出变形量﹐也可根据干涉条纹的异常变形分析出被测物的内部缺陷。
扫描法 利用激光方向性好这一特性形成的细光束扫描工件﹐测量工件的外径或厚度(图3 用扫描法测量工件的外径或厚度 )。 激光器发出的光束经準直透镜和迴转的透明四面棱体週期性地扫描工件外径﹐当扫描至工件边缘时﹐即被遮住。此时光电转换元件发出信号﹐电子计数器开始计算与四面棱体同轴安装的圆光栅副发生的莫尔条纹数﹐直至激光束扫描至工件另一边缘﹐光电转换元件发出计数终止信号为止。所得莫尔条纹总数经过当量转换后即得到被测外径值。也可利用其他方法﹐例如由音叉谐振產生激光束扫描运动和利用计时脉衝作为计数频率等。
激光器发出的光束经準直透镜和迴转的透明四面棱体週期性地扫描工件外径﹐当扫描至工件边缘时﹐即被遮住。此时光电转换元件发出信号﹐电子计数器开始计算与四面棱体同轴安装的圆光栅副发生的莫尔条纹数﹐直至激光束扫描至工件另一边缘﹐光电转换元件发出计数终止信号为止。所得莫尔条纹总数经过当量转换后即得到被测外径值。也可利用其他方法﹐例如由音叉谐振產生激光束扫描运动和利用计时脉衝作为计数频率等。
干涉法 利用光波干涉现象精密测长的方法。两束具有相同频率﹑相位和振动方向的光波S 1﹑S 2﹐经过不同的光程后在空间相交。当光程差等於波长整倍数时﹐波峰与波峰相遇叠加﹐光亮加强﹐出现亮的干涉条纹﹔当光程差等於半波长的奇倍数时﹐波峰与波谷相遇﹐光亮减弱﹐出现暗的干涉条纹。这种现象称为光波干涉现象(图1 光波干涉现象 )。
利用干涉法测量位移的原理(图2a 干涉法测量 )是﹕从光源发出的光﹐经分光镜分为两路。一路透过分光镜射向可动反射镜1 ﹐另一路由分光镜反射到固定反射镜2﹐并分别从1和2反射回来﹐经过分光镜叠加在接受屏上。每当1移动1/2波长时﹐接受屏上的干涉条纹就会出现一次由暗到亮或者由亮到暗的变化。计算这些明暗变化次数就可以计算出1 的移动量。利用这一原理测量位移的光学系统称为迈克耳逊干涉系统。激光干涉仪就是用这个系统来测长的。 此外﹐干涉法还可用於平面度测量和微量变形测量。后者是通过全息照相实现的(图2b 干涉法测量 )。
由激光器发出的光束经分光镜分为两路。一路经反射镜1反射后成为参考光束射向感光胶片﹐另一路经反射镜2反射后射向被测物﹐再由被测物反射后也射向感光胶片。此光束和参考光束在感光胶片上叠加后產生干涉图样。干涉图样的形状反映被测物反射光束与参考光束的相位差﹐从而反映被测物表面几何形状相互位置的关係。干涉图样的明暗对比程度反映被测物光的强弱(振幅的平方)。这样﹐被测物反射光波的全部信息就被记录下来。这种记录被测物光全部信息的胶片即称为全息照片。用激光照射全息照片﹐就能再现被测物光的立体图象。对被测物在不加载和加载变形条件下双重曝光全息照相后﹐可根据全息照片上的干涉图样计算出变形量﹐也可根据干涉条纹的异常变形分析出被测物的内部缺陷。 扫描法 利用激光方向性好这一特性形成的细光束扫描工件﹐测量工件的外径或厚度(图3 用扫描法测量工件的外径或厚度 )。
激光器发出的光束经準直透镜和迴转的透明四面棱体週期性地扫描工件外径﹐当扫描至工件边缘时﹐即被遮住。此时光电转换元件发出信号﹐电子计数器开始计算与四面棱体同轴安装的圆光栅副发生的莫尔条纹数﹐直至激光束扫描至工件另一边缘﹐光电转换元件发出计数终止信号为止。所得莫尔条纹总数经过当量转换后即得到被测外径值。也可利用其他方法﹐例如由音叉谐振產生激光束扫描运动和利用计时脉衝作为计数频率等。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条